視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]
|
|
|
- Meghan O’Connor’
- 5 years ago
- Views:
Transcription
1 視覚情報処理論 (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]
2 Computer Vision Design algorithms to implement the function of human vision 3D reconstruction from 2D image (retinal image) Eyes for robots: Robot Vision


3 Computer Vision Paradigm (Marr) Object oriented 3D Model 3D representation Observer oriented 2.5D Image Integration Brightness Texture Line drawing Stereo Motion 3D Feature Extraction (shape-from-x) 2D Image
4 Research topics 3D computer vision Recognition and detection Low-level vision, image processing, tracking Vision for Robotics Others Optimization methods Computational Photography Statistical methods and learning Biomedial image analysis
5 3D Computer Vision



6 Binocular Stereo

7 Motion Stereo StereoScan: Dense 3D Reconstruction in Real-time [A. Geiger et al. Intelligent Vehicles Symposium (IV), 2011]

8 Multi-view Stereo Dense multi-view stereo Patch-based multi-view stereo [Furukawa and Ponce, CVPR 2007]

9 Structure from Motion Structure from motion Building Rome in a Day [Agarwal et al. ICCV 2009]


![1989] focus](/docs-images/95/123948781/images/10-2.jpg "[Nayer 1989]")
10 Shape from Shading Numerical Shape from Shading [Ikeuchi & Horn, 1989] Shape from focus [Nayer 1989]




11 Photometric Stereo Photometric Stereo Consensus photometric Stereo Higo et al. CVPR input images Consensus PS Standard PS

12 RGB-D SLAM Kinect Fusion [Izadi et al. ICCV 2011]
13 RGB-D SLAM for Dynamic Scene DynamicFusion [Newcombe et al. CVPR 2015]

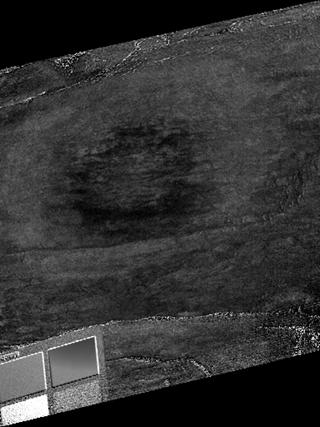
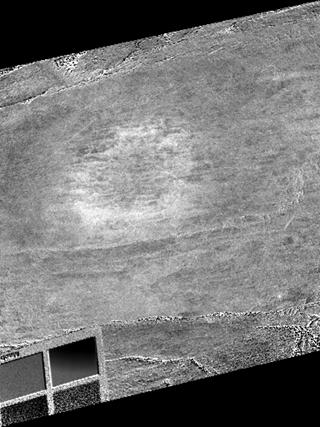
14 LiDAR Scanning Laser scanning Flying Range Sensor: Aerial Scan in Omini-directions [B. Zheng et al. 3DV 2015]

15 3D Vision for Cultural Heritage Adaptive Tetrapuzzles. Cignoni et al. SIGGRAPH 2004 Great Buddha Project [Ikeuchi et al. 2007]
16 Recognition and Detection
17 Face Recognition Eigenfaces [Turk and Pentland '91] DeepFace [Taigman et al. 2014]


18 Gesture Recognition iclone Kinect MoCAP Plugin


19 Gait Recognition Identification of persons by walking silhouette Gait Recognition: Databases, Representations, and Applications Makihara et al.








20 Object Recognition Training images Eigen space Voting Eigen space method Input image Eigen window method Recognition result

21 Object Detection and Segmentation Learning Rich Features from RGB-D Images for Object Detection and Segmentation [Gupta et al. ECCV 2014]
22 3D Shape Recognition Multi-view Convolutional Neural Networks for 3D Shape Recognition [H. Su et al. ICCV 2015]

23 Pedestrian Detection Stable multi-target tracking in real-time surveillance video [B. Benfold and I. Reid (CVPR '11)]


24 Real-time 3D Tracking Robust, Real-Time 3D Tracking of Multiple Objects with Similar Appearances [Sekii CVPR 2016]


25 YOLO: Real-Time Object Detection Joseph Redmon, Ali Farhadi, YOLO9000: Better, Faster, Stronger, CVPR
26 Low-level Vision, Image Processing, Tracking

27 Optical Flow Semantic Optical Flow Sevilla-Lara et al. CVPR 2016

28 Video inpainting Background Inpainting for Videos with Dynamic Objects and a Free-moving Camera [Granados et al. ECCV 2012]

29 Motion tracking: Augmented Reality PTAM: Parallel Tracking and Mapping For Small AR Workspaces Klein and Murray, ISMAR 2007

30 Dense Tracking and Mapping DTAM: Dense Tracking and Mapping in Real-Time Newcombe et al. ICCV 2011


31 CNN-based Semantic Segmentation "SegNet: A Deep Convolutional Encoder-Decoder Architecture for Robust Semantic Pixel-Wise Labelling." Badrinarayanan et al. CVPR 2015
32 Vision for Robotics



33 Vision for Intelligent Vehicle Autonomous Driving
 ICP-based alignment Levenberg-Marquardt algorithm Huber cost")
34 Monocular camera localization in 3D LiDAR maps [Caselitz et al. IROS 2016] ORB-SLAM (Local bundle adjustment) ICP-based alignment Levenberg-Marquardt algorithm Huber cost function

35 Teleoperation


36 Robot for Emergency Situations: DRC


37 Robot for Factory Automation
38 Others


39 Optimization methods Graph cut Interactive Graph Cuts Boykov and Jolly (ICCV 2001) Lazy snapping Yin Li et al. ACM Trans. Graph. 2004


40 Optimization methods Robust PCA Robust Principal Component Analysis?, Candès et al. Journal of the ACM 2011

41 Statistical methods and learning "SegNet: A Deep Convolutional Encoder-Decoder Architecture for Robust Semantic Pixel-Wise Labelling." Badrinarayanan et al. CVPR 2015

42 Computational photography, photometry, shape from X Fast Separation of Direct and Global Components of a Scene using High Frequency Illumination [S.K. Nayar et al. SIGGRAPH 2006]

43 Computational photography, photometry, shape from X De-hazing Single Image Dehazing [Fattal SIGGRAPH 2008]









44 Computational photography, photometry, shape from X [Tominaga et al. 2000] Hyperspectral imaging LCTF Monochromatic CCD camera 416nm 408nm 404nm 400nm nm 712nm 720nm 716nm nm 400nm 720nm t (s)


45 Biomedical image analysis Cell Tracking Cell population tracking and lineage construction with spatiotemporal context [K. Li et al. Medical Image Analysis 2008]
46 About [Visual Information Processing] Topic Related to Computer Vision Research Format Lectures in Japanese (partially in English) Evaluation Participation 50% Report 50%
47 Schedule 9/ 26 Introduction (Prof. Oishi) 10/3 Patch-based Object Recognition (1) (Dr. Kagesawa) 10/10 Patch-based Object Recognition (2) (Dr. Kagesawa) 10/17 Computer Vision Basics (1)(Prof. Oishi) 10/24 Computer Vision Basics (2)(Prof. Oishi) 10/31 Image and Video Inpainting (1) (Dr. Roxas) ( in English) 11/7 Image and Video Inpainting (2) (Dr. Roxas) ( in English) 11/14 (Cancelled) 11/21 Vision for Robotics Applications (1) (Dr. Sato) 11/28 Vision for Robotics Applications (2) (Dr. Sato) 12/5 3D Data Visualization (1) (Dr. Okamoto) 12/12 3D Data Visualization (2) (Dr. Okamoto) 12/19 3D Data Processing (1) (Prof. Oishi) 1/9 3D Data Processing (2) (Prof. Oishi)
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich. LSD-SLAM: Large-Scale Direct Monocular SLAM
 Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
15 Years of Visual SLAM
 15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Dense 3D Reconstruction from Autonomous Quadrocopters
 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Human-Robot Interaction
 Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
Human-Robot Interaction Elective in Artificial Intelligence Lecture 6 Visual Perception Luca Iocchi DIAG, Sapienza University of Rome, Italy With contributions from D. D. Bloisi and A. Youssef Visual Perception
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Rectification of Aerial 3D Laser Scans via Line-based Registration to Ground Model
 [DOI: 10.2197/ipsjtcva.7.89] Express Paper Rectification of Aerial 3D Laser Scans via Line-based Registration to Ground Model Ryoichi Ishikawa 1,a) Bo Zheng 1,b) Takeshi Oishi 1,c) Katsushi Ikeuchi 1,d)
[DOI: 10.2197/ipsjtcva.7.89] Express Paper Rectification of Aerial 3D Laser Scans via Line-based Registration to Ground Model Ryoichi Ishikawa 1,a) Bo Zheng 1,b) Takeshi Oishi 1,c) Katsushi Ikeuchi 1,d)
Multi-view reconstruction for projector camera systems based on bundle adjustment
 Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Deep Learning for Virtual Shopping. Dr. Jürgen Sturm Group Leader RGB-D
 Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Rail Sensor: A Mobile Lidar System for 3D Archiving the Bas-reliefs in Angkor Wat
 [DOI: 10.2197/ipsjtcva.7.59] Express Paper Rail Sensor: A Mobile Lidar System for 3D Archiving the Bas-reliefs in Angkor Wat Bo Zheng 1,a) Takeshi Oishi 1,b) Katsushi Ikeuchi 1,c) Received: March 13, 2015,
[DOI: 10.2197/ipsjtcva.7.59] Express Paper Rail Sensor: A Mobile Lidar System for 3D Archiving the Bas-reliefs in Angkor Wat Bo Zheng 1,a) Takeshi Oishi 1,b) Katsushi Ikeuchi 1,c) Received: March 13, 2015,
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS
 DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Object Reconstruction
 B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
B. Scholz Object Reconstruction 1 / 39 MIN-Fakultät Fachbereich Informatik Object Reconstruction Benjamin Scholz Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Fachbereich
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION
 LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
Non-line-of-sight imaging
 Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
Non-line-of-sight imaging http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 25 Course announcements Homework 6 will be posted tonight. - Will
High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images
 MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Monocular Visual Odometry
 Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
SLAM II: SLAM for robotic vision-based perception
 SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
3D Spatial Layout Propagation in a Video Sequence
 3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Skeleton Cube for Lighting Environment Estimation
 (MIRU2004) 2004 7 606 8501 E-mail: {takesi-t,maki,tm}@vision.kuee.kyoto-u.ac.jp 1) 2) Skeleton Cube for Lighting Environment Estimation Takeshi TAKAI, Atsuto MAKI, and Takashi MATSUYAMA Graduate School
(MIRU2004) 2004 7 606 8501 E-mail: {takesi-t,maki,tm}@vision.kuee.kyoto-u.ac.jp 1) 2) Skeleton Cube for Lighting Environment Estimation Takeshi TAKAI, Atsuto MAKI, and Takashi MATSUYAMA Graduate School
Reconstruction, Motion Estimation and SLAM from Events
 Reconstruction, Motion Estimation and SLAM from Events Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison June
Reconstruction, Motion Estimation and SLAM from Events Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison June
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES
 FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs
 FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Towards Sensor-Aided Multi-View Reconstruction for High Accuracy Applications
 Towards Sensor-Aided Multi-View Reconstruction for High Accuracy Applications Mikhail M. Shashkov, Mauricio Hess-Flores, Shawn Recker, and Kenneth I. Joy Institute for Data Analysis and Visualization University
Towards Sensor-Aided Multi-View Reconstruction for High Accuracy Applications Mikhail M. Shashkov, Mauricio Hess-Flores, Shawn Recker, and Kenneth I. Joy Institute for Data Analysis and Visualization University
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Delivering Deep Learning to Mobile Devices via Offloading
 Delivering Deep Learning to Mobile Devices via Offloading Xukan Ran*, Haoliang Chen*, Zhenming Liu 1, Jiasi Chen* *University of California, Riverside 1 College of William and Mary Deep learning on mobile
Delivering Deep Learning to Mobile Devices via Offloading Xukan Ran*, Haoliang Chen*, Zhenming Liu 1, Jiasi Chen* *University of California, Riverside 1 College of William and Mary Deep learning on mobile
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Deep Models for 3D Reconstruction
 Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Monocular Camera Localization in 3D LiDAR Maps
 Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
List of Accepted Papers for ICVGIP 2018
 List of Accepted Papers for ICVGIP 2018 Paper ID ACM Article Title 3 1 PredGAN - A deep multi-scale video prediction framework for anomaly detection in videos 7 2 Handwritten Essay Grading on Mobiles using
List of Accepted Papers for ICVGIP 2018 Paper ID ACM Article Title 3 1 PredGAN - A deep multi-scale video prediction framework for anomaly detection in videos 7 2 Handwritten Essay Grading on Mobiles using
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Vol agile avec des micro-robots volants contrôlés par vision
 Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Computer Vision EE837, CS867, CE803
 Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
Autonomous 3D Reconstruction Using a MAV
 Autonomous 3D Reconstruction Using a MAV Alexander Popov, Dimitrios Zermas and Nikolaos Papanikolopoulos Abstract An approach is proposed for high resolution 3D reconstruction of an object using a Micro
Autonomous 3D Reconstruction Using a MAV Alexander Popov, Dimitrios Zermas and Nikolaos Papanikolopoulos Abstract An approach is proposed for high resolution 3D reconstruction of an object using a Micro
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor
 AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
Eigen-Texture Method : Appearance Compression based on 3D Model
 Eigen-Texture Method : Appearance Compression based on 3D Model Ko Nishino Yoichi Sato Katsushi Ikeuchi Institute of Industrial Science, The University of Tokyo 7-22-1 Roppongi, Minato-ku, Tokyo 106-8558,
Eigen-Texture Method : Appearance Compression based on 3D Model Ko Nishino Yoichi Sato Katsushi Ikeuchi Institute of Industrial Science, The University of Tokyo 7-22-1 Roppongi, Minato-ku, Tokyo 106-8558,
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information
 A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
arxiv: v2 [cs.cv] 21 Feb 2018
![arxiv: v2 [cs.cv] 21 Feb 2018](/thumbs/80/82171285.jpg "arxiv: v2 [cs.cv] 21 Feb 2018") UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning Ruihao Li 1, Sen Wang 2, Zhiqiang Long 3 and Dongbing Gu 1 arxiv:1709.06841v2 [cs.cv] 21 Feb 2018 Abstract We propose a novel monocular
UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning Ruihao Li 1, Sen Wang 2, Zhiqiang Long 3 and Dongbing Gu 1 arxiv:1709.06841v2 [cs.cv] 21 Feb 2018 Abstract We propose a novel monocular
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING
 STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Project Ideas Dates 11/13 Proposals due - 1 page write-up - summary and goals (problem/approach) - what are the key references - where will you get data
Introduction to Computer Vision Michael J. Black Project Ideas Dates 11/13 Proposals due - 1 page write-up - summary and goals (problem/approach) - what are the key references - where will you get data
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Visual-Inertial Localization and Mapping for Robot Navigation
 Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Visual SLAM. An Overview. L. Freda. ALCOR Lab DIAG University of Rome La Sapienza. May 3, 2016
 An Overview L. Freda ALCOR Lab DIAG University of Rome La Sapienza May 3, 2016 L. Freda (University of Rome La Sapienza ) Visual SLAM May 3, 2016 1 / 39 Outline 1 Introduction What is SLAM Motivations
An Overview L. Freda ALCOR Lab DIAG University of Rome La Sapienza May 3, 2016 L. Freda (University of Rome La Sapienza ) Visual SLAM May 3, 2016 1 / 39 Outline 1 Introduction What is SLAM Motivations
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Image Analysis & Retrieval
 Outline CS/EE 5590 / ENG 401 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Image Analysis & Retrieval Background Objective of the class Prerequisite Lecture Plan Course Project
Outline CS/EE 5590 / ENG 401 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Image Analysis & Retrieval Background Objective of the class Prerequisite Lecture Plan Course Project
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction
 CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction Keisuke Tateno 1,2, Federico Tombari 1, Iro Laina 1, Nassir Navab 1,3 {tateno, tombari, laina, navab}@in.tum.de 1 CAMP - TU Munich
CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction Keisuke Tateno 1,2, Federico Tombari 1, Iro Laina 1, Nassir Navab 1,3 {tateno, tombari, laina, navab}@in.tum.de 1 CAMP - TU Munich
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects
 Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
Video Object Segmentation using Deep Learning
 Video Object Segmentation using Deep Learning Update Presentation, Week 3 Zack While Advised by: Rui Hou, Dr. Chen Chen, and Dr. Mubarak Shah June 2, 2017 Youngstown State University 1 Table of Contents
Video Object Segmentation using Deep Learning Update Presentation, Week 3 Zack While Advised by: Rui Hou, Dr. Chen Chen, and Dr. Mubarak Shah June 2, 2017 Youngstown State University 1 Table of Contents
A Gentle Introduction to Bilateral Filtering and its Applications 10/10: Conclusions
 A Gentle Introduction to Bilateral Filtering and its Applications 10/10: Conclusions Jack Tumblin EECS, Northwestern University The Bilateral Filter As Simple as Weights from two Gaussian Functions; Has
A Gentle Introduction to Bilateral Filtering and its Applications 10/10: Conclusions Jack Tumblin EECS, Northwestern University The Bilateral Filter As Simple as Weights from two Gaussian Functions; Has
Image Analysis & Retrieval Lec-01: Introduction
 CS/EE 5590 / ENG 401 Special Topics Spring 2017, M/W 5:30-6:45pm@Haag 309 Image Analysis & Retrieval Lec-01: Introduction Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu
CS/EE 5590 / ENG 401 Special Topics Spring 2017, M/W 5:30-6:45pm@Haag 309 Image Analysis & Retrieval Lec-01: Introduction Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Augmented Reality. Sung-eui Yoon
 Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites: