Pilot Study: A Real-time Truck Parking Availability System for Kansas*
|
|
|
- Olivia Erika Cox
- 6 years ago
- Views:
Transcription
1 Pilot Study: A Real-time Truck Parking Availability System for Kansas* Ted Morris, Vasillios Morellas, Nikolaos Papanikolopoulos Department of Computer Science and Engineering University of Minnesota *Supported by the Kansas Department of Transportation and University of Minnesota NSF Industry/University Cooperative Research Centers Program May 1-3, 2017
2 Pilot Study Objectives 1. Detect empty and occupied parking spaces using state-of-the-art computer vision techniques 2. Deliver real-time parking availability to truck drivers through roadside message boards and the TPIMS regional parking notification message sharing protocol. 3. Evaluate system wide performance through field operational testing May 1-3,
3 Synopsis Truck parking detection overview and detection approach Kansas pilot site description System architecture Preliminary results Ongoing developments May 1-3,
 Small detection error bias caused occupancy count errors to accumulate at an unacceptable rate Stalls Occupied detected observed Time May 1-3, 2017")
4 Parking Detection Automated counting of occupied parking spaces is not a straight forward problem: Entrance/Exit Trip-wire count detection (Martin, 2012, 2011; Gentler & Murray, 2011; Fallon & Howard, 2011) Small detection error bias caused occupancy count errors to accumulate at an unacceptable rate Stalls Occupied detected observed Time May 1-3,





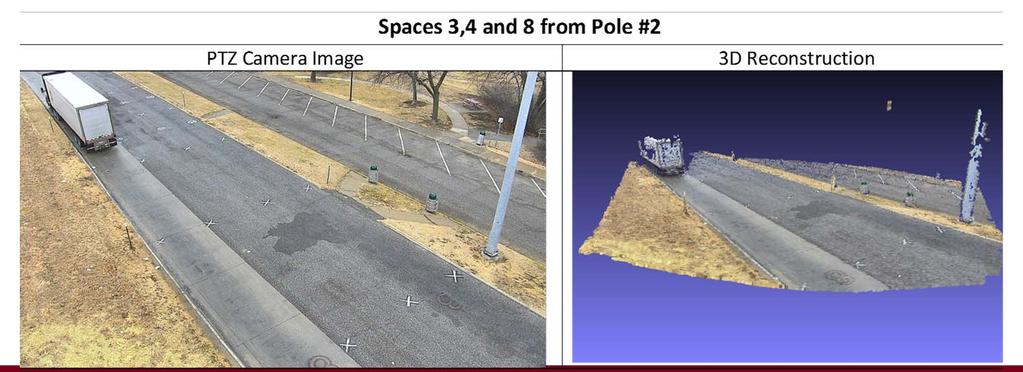
5 Key Idea for Detection Multiple camera views reconstruct the scene in 3D. 3D reconstruction: Measures space occupancy directly by seeing the vehicles present or absent in a way similar to the way people do, in 3D. Remains robust to problems with sharp shadows, partial occlusion, and other lighting changes that traditionally confound non-3d image processing techniques No recalibration or re-zeroing. May 1-3,






6 Our Approach 1. Multi-view PTZ HD Images Acquisition D Reconstruction and alignment z y x 3. 3D background removal and occupancy classification May 1-3,
7 Previous Operational Pilot Study Tested approach by installing system at three public rest areas along Minnesota I-94, West of the Twin Cities Monitored and evaluated detection performance for over 2 years Over 95 percent accurate May 1-3,

8 Pilot Site Deployment Deployed Two 35 foot light poles with 10 foot luminaire arms and 3 PTZ HD cameras Fiber network connection to KDOT Operations Center May 1-3,

9 Pilot Site Deployment Westbound Junction City Rest Area, I-70 May 1-3,

10 Site Layout And Preparation Derived virtual parking spaces from the published capacity of 10 parking stalls Surveyed XY baseline and 56 roadway markings to use for initial alignment parameter calibration May 1-3,


11 May 1-3,

12 May 1-3,
13 System Architecture Vision Module Servers Site IP cameras Occupancy Report XML HTTP/HTTPS Nginx Web server, PostgreSQL database CMS NTCIP 1203 SNMP/TCP CMS NTCIP 1203 SNMP/TCP HTTP GET IRIS Server NTCIP MULTI (QUERY API) TPIMS Reporting and Real-time Notification Protocol (HTTP/JSON) External Services Truck Parking ** May 1-3,
14 Preliminary Results about 5 days of recorded data ground-truthed for parking space occupancy by external evaluators (SRF Consulting Group, Minnesota) Detection Accuracy Stalls 5,10 Stalls 4,9 Stalls 3,8 Stalls 2,7 Stalls 1,6 Weighted Average Occupancy 99.35% 93.72% 96.37% 98.75% 92.37% 96.21% Vacancy 85.85% 87.30% 78.90% 78.83% 92.66% 84.60% Overall 93.04% 90.25% 87.12% 87.17% 92.53% 90.01% Sample Size May 1-3,




15 Preliminary Results Parking space occupancy web server dashboard May 1-3,
16 Preliminary Results Manually counted trucks from camera observations and compared occupancy detection count reported from web server (performed by SRF Consulting Group, Minnesota) Randomly performed 28 such observations during the data collection period May 1-3,
17 Preliminary Conclusions Preliminary results indicated 90% overall detection accuracy Actual number of observed trucks parked and occupancy detection have reasonable agreement; spatial occupancy detection tended to have an over-count bias Parking behaviors observed not always conformant with intended parking stalls May 1-3,
18 Future and ongoing work Observed Undisciplined parking behavior created scenarios where truck counts nor pre-defined spatial detection occupancy counts match actual space availability. Investigating the utilization of unsupervised clustering with fast ground plane segmentation 1 defines 3D vehicle bounding boxes that will allow the system to measure spatial distances between parked vehicles Advantage of using same detection architecture Harvested more datasets for further evaluation 1 Zermas et. al, Fast Segmentation of 3D Point Clouds: A Paradigm on LiDAR Data for Automomous Vehicle Applications, accepted ICRA 2017 May 1-3,

19 Spatial 3D truck blobs Daytime clustering of the multiple aligned 3D reconstructions from multiple views May 1-3,

20 Spatial 3D truck blobs Nightime clustering of the multiple aligned 3D reconstructions from multiple views May 1-3,


21 Thanks for Listening! rosehub.umn.edu *Supported by the Kansas Department of Transportation and University of Minnesota NSF Industry/University Cooperative Research Centers Program May 1-3,
LAWRENCE-DOUGLAS COUNTY INTELLIGENT JOURNEY
 LAWRENCE-DOUGLAS COUNTY INTELLIGENT JOURNEY L-DC REGIONAL ITS ARCHITECTURE AND STRATEGIC DEPLOYMENT PLAN EXECUTIVE SUMMARY The Lawrence-Douglas County Metropolitan Planning Organization (L- DC MPO) has
LAWRENCE-DOUGLAS COUNTY INTELLIGENT JOURNEY L-DC REGIONAL ITS ARCHITECTURE AND STRATEGIC DEPLOYMENT PLAN EXECUTIVE SUMMARY The Lawrence-Douglas County Metropolitan Planning Organization (L- DC MPO) has
Multi-Sensor Traffic Data Fusion
 CALIFORNIA PATH PROGRAM INSTITUTE OF TRANSPORTATION STUDIES UNIVERSITY OF CALIFORNIA, BERKELEY Multi-Sensor Traffic Data Fusion ZuWhan Kim, A. Skabardonis California PATH Working Paper UCB-ITS-PWP-2003-3
CALIFORNIA PATH PROGRAM INSTITUTE OF TRANSPORTATION STUDIES UNIVERSITY OF CALIFORNIA, BERKELEY Multi-Sensor Traffic Data Fusion ZuWhan Kim, A. Skabardonis California PATH Working Paper UCB-ITS-PWP-2003-3
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation
 Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation Jong Taek Lee, M. S. Ryoo, Matthew Riley, and J. K. Aggarwal Computer & Vision Research Center Dept. of Electrical & Computer Engineering,
Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation Jong Taek Lee, M. S. Ryoo, Matthew Riley, and J. K. Aggarwal Computer & Vision Research Center Dept. of Electrical & Computer Engineering,
ROAD-SCANNER COMPACT APPLICATION FIELDS MAIN FEATURES
 ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
Learning bottom-up visual processes using automatically generated ground truth data
 Learning bottom-up visual processes using automatically generated ground truth data Kalle Åström, Yubin Kuang, Magnus Oskarsson, Lars Kopp an Martin Byröd Mathematical Imaging Group Center for Mathematical
Learning bottom-up visual processes using automatically generated ground truth data Kalle Åström, Yubin Kuang, Magnus Oskarsson, Lars Kopp an Martin Byröd Mathematical Imaging Group Center for Mathematical
SHRP 2 Safety Research Symposium July 27, Site-Based Video System Design and Development: Research Plans and Issues
 SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
New Tools in Aircraft Accident Reconstruction to Assist the Insurer. Overview. Overview 4/30/2015
 New Tools in Aircraft Accident Reconstruction to Assist the Insurer Steven L. Steve Morris Senior Managing Consultant and Manager of Colorado Operations Engineering Systems Inc (ESI) Overview ESI has reconstructed
New Tools in Aircraft Accident Reconstruction to Assist the Insurer Steven L. Steve Morris Senior Managing Consultant and Manager of Colorado Operations Engineering Systems Inc (ESI) Overview ESI has reconstructed
RTMS Solutions. Detection solutions to fit your city s needs.
 RTMS Solutions Detection solutions to fit your city s needs. Keeping your daily commute free of congestion - and maintenance. Behind the scenes in cities all over the world, RTMS radar detection solutions
RTMS Solutions Detection solutions to fit your city s needs. Keeping your daily commute free of congestion - and maintenance. Behind the scenes in cities all over the world, RTMS radar detection solutions
Collaborative Networks of Image Sensors
 Collaborative Networks of Image Sensors Abbas El Gamal, EE Leonidas Guibas, CS Balaji Prabhakar, EE&CS Ali Ozer Ercan. EE Jaewon Shin, EE Danny Yang, CS Wireless Sensor Networks small Distributed systems
Collaborative Networks of Image Sensors Abbas El Gamal, EE Leonidas Guibas, CS Balaji Prabhakar, EE&CS Ali Ozer Ercan. EE Jaewon Shin, EE Danny Yang, CS Wireless Sensor Networks small Distributed systems
A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification
 A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification Huei-Yung Lin * and Juang-Yu Wei Department of Electrical Engineering National Chung Cheng University Chia-Yi
A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification Huei-Yung Lin * and Juang-Yu Wei Department of Electrical Engineering National Chung Cheng University Chia-Yi
Bus Detection and recognition for visually impaired people
 Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Person identification from spatio-temporal 3D gait
 200 International Conference on Emerging Security Technologies Person identification from spatio-temporal 3D gait Yumi Iwashita Ryosuke Baba Koichi Ogawara Ryo Kurazume Information Science and Electrical
200 International Conference on Emerging Security Technologies Person identification from spatio-temporal 3D gait Yumi Iwashita Ryosuke Baba Koichi Ogawara Ryo Kurazume Information Science and Electrical
Vehicle Occupant Posture Analysis Using Voxel Data
 Ninth World Congress on Intelligent Transport Systems, Chicago, Illinois, October Vehicle Occupant Posture Analysis Using Voxel Data Ivana Mikic, Mohan Trivedi Computer Vision and Robotics Research Laboratory
Ninth World Congress on Intelligent Transport Systems, Chicago, Illinois, October Vehicle Occupant Posture Analysis Using Voxel Data Ivana Mikic, Mohan Trivedi Computer Vision and Robotics Research Laboratory
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
Automatic vehicle classification based on vision
 Redouane Kachach redouane.kachach@gmail.com Universidad Rey Juan Carlos Index 1 Index Introduction Software Design Background estimation Tracking and vehicle counting Automatic vehicle classification Stats
Redouane Kachach redouane.kachach@gmail.com Universidad Rey Juan Carlos Index 1 Index Introduction Software Design Background estimation Tracking and vehicle counting Automatic vehicle classification Stats
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Sensor Fusion-Based Parking Assist System
 Sensor Fusion-Based Parking Assist System 2014-01-0327 Jaeseob Choi, Eugene Chang, Daejoong Yoon, and Seongsook Ryu Hyundai & Kia Corp. Hogi Jung and Jaekyu Suhr Hanyang Univ. Published 04/01/2014 CITATION:
Sensor Fusion-Based Parking Assist System 2014-01-0327 Jaeseob Choi, Eugene Chang, Daejoong Yoon, and Seongsook Ryu Hyundai & Kia Corp. Hogi Jung and Jaekyu Suhr Hanyang Univ. Published 04/01/2014 CITATION:
Trimble VISION Positions from Pictures
 Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
AutoCalib: Automatic Calibration of Traffic Cameras at Scale
 AutoCalib: Automatic of Traffic Cameras at Scale Romil Bhardwaj, Gopi Krishna Tummala*, Ganesan Ramalingam, Ramachandran Ramjee, Prasun Sinha* Microsoft Research, *The Ohio State University Number of Cameras
AutoCalib: Automatic of Traffic Cameras at Scale Romil Bhardwaj, Gopi Krishna Tummala*, Ganesan Ramalingam, Ramachandran Ramjee, Prasun Sinha* Microsoft Research, *The Ohio State University Number of Cameras
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
TRASLO 3D Reconstruction with Active Stereo for picking and mapping in Automated Warehouses.
 TRASLO 3D Reconstruction with Active Stereo for picking and mapping in Automated Warehouses. Andrea Brandolese, System Spa Kilometro Rosso, Bergamo. 13 02 2013 1 SUMMARY Case study and solution idea. Differents
TRASLO 3D Reconstruction with Active Stereo for picking and mapping in Automated Warehouses. Andrea Brandolese, System Spa Kilometro Rosso, Bergamo. 13 02 2013 1 SUMMARY Case study and solution idea. Differents
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Multi-camera Based Traffic Flow Characterization & Classification
 Proceedings of the 27 IEEE Intelligent Transportation Systems Conference Seattle, WA, USA, Sept. 3 - Oct. 3, 27 TuA2.1 Multi-camera Based Traffic Flow Characterization & Classification Ramsin Khoshabeh,
Proceedings of the 27 IEEE Intelligent Transportation Systems Conference Seattle, WA, USA, Sept. 3 - Oct. 3, 27 TuA2.1 Multi-camera Based Traffic Flow Characterization & Classification Ramsin Khoshabeh,
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Traffic Technology. PoliScan Scanning Lidar: Metrological Principle and Application. VITRONIC Group. 7/15/2013 1
 Traffic Technology PoliScan Scanning Lidar: Metrological Principle and Application 7/15/2013 1 Agenda Company Profile Metrological Principles of PoliScan Laser Based Speed Enforcement Laser Based Red Light
Traffic Technology PoliScan Scanning Lidar: Metrological Principle and Application 7/15/2013 1 Agenda Company Profile Metrological Principles of PoliScan Laser Based Speed Enforcement Laser Based Red Light
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING
 CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
A Strategy and Vision for Enterprise 3D GIS. B r o o k s P a t r i c k A c c o u n t E x e c u t i v e b p a t r i c e s r i.
 A Strategy and Vision for Enterprise 3D GIS B r o o k s P a t r i c k A c c o u n t E x e c u t i v e b p a t r i c k @ e s r i. c o m Understanding where things are, and why, is essential for rational
A Strategy and Vision for Enterprise 3D GIS B r o o k s P a t r i c k A c c o u n t E x e c u t i v e b p a t r i c k @ e s r i. c o m Understanding where things are, and why, is essential for rational
STREAMS Integrated Network Management Presented by: Matthew Cooper
 STREAMS Integrated Network Management Presented by: Matthew Cooper Transmax helps customers realise the community benefits of optimising transport networks by providing smarter, more sustainable ITS solutions.
STREAMS Integrated Network Management Presented by: Matthew Cooper Transmax helps customers realise the community benefits of optimising transport networks by providing smarter, more sustainable ITS solutions.
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE
 Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Presentation Outline. Preserving the Evidence: Multi-Platform 3D Reality Captures for Tornado Damage. Objectives. Learning from Tornado Damage
 Presentation Outline Preserving the Evidence: Multi-Platform 3D Reality Captures for Tornado Damage J. ArnWomble, Ph.D., P.E. Assistant Professor of Civil Engineering West Texas A&M University Canyon/Amarillo,
Presentation Outline Preserving the Evidence: Multi-Platform 3D Reality Captures for Tornado Damage J. ArnWomble, Ph.D., P.E. Assistant Professor of Civil Engineering West Texas A&M University Canyon/Amarillo,
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Regional TSM&O Vision and ITS Architecture Update
 Regional TSM&O Vision and ITS Architecture Update Progress Update Transportation Coordinating Committee April 5, 2019 Task List (2018 2020) 1. Develop a Regional TSM&O Vision 2. Document Current TSM&O
Regional TSM&O Vision and ITS Architecture Update Progress Update Transportation Coordinating Committee April 5, 2019 Task List (2018 2020) 1. Develop a Regional TSM&O Vision 2. Document Current TSM&O
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data. Pierre-Paul Grondin, B.Sc. Surveying
 Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data Pierre-Paul Grondin, B.Sc. Surveying LIDAR (Light Detection and Ranging) The prevalent method to determine distance to an object
Using Mobile LiDAR To Efficiently Collect Roadway Asset and Condition Data Pierre-Paul Grondin, B.Sc. Surveying LIDAR (Light Detection and Ranging) The prevalent method to determine distance to an object
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell
 Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Performance Evaluation of Non-Intrusive Methods for Traffic Data Collection. Kamal Banger, Ministry of Transportation of Ontario
 Abstract Performance Evaluation of Non-Intrusive Methods for Traffic Data Collection Kamal Banger, Ministry of Transportation of Ontario Nancy Adriano, P.Eng., Ministry of Transportation of Ontario For
Abstract Performance Evaluation of Non-Intrusive Methods for Traffic Data Collection Kamal Banger, Ministry of Transportation of Ontario Nancy Adriano, P.Eng., Ministry of Transportation of Ontario For
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Data Integration for Integrated Corridor Management
 Dr. Kevin T Miller, Kapsch TrafficCom USA, Troy, MI, USA Matt Juckes, Kapsch TrafficCom USA Jeremy Dilmore, Florida Department of Transportation Robert Heller, Southwest Research Institute Abstract Modern
Dr. Kevin T Miller, Kapsch TrafficCom USA, Troy, MI, USA Matt Juckes, Kapsch TrafficCom USA Jeremy Dilmore, Florida Department of Transportation Robert Heller, Southwest Research Institute Abstract Modern
PETS2009: Dataset and Challenge
 PETS2009: Dataset and Challenge J. Ferryman and A. Shahrokni Computational Vision Group School of Systems Engineering University of Reading Whiteknights, Reading, RG6 6AY, UK {j.m.ferryman a.shahrokni}@reading.ac.uk
PETS2009: Dataset and Challenge J. Ferryman and A. Shahrokni Computational Vision Group School of Systems Engineering University of Reading Whiteknights, Reading, RG6 6AY, UK {j.m.ferryman a.shahrokni}@reading.ac.uk
Vehicle Detection Using Android Smartphones
 University of Iowa Iowa Research Online Driving Assessment Conference 2013 Driving Assessment Conference Jun 19th, 12:00 AM Vehicle Detection Using Android Smartphones Zhiquan Ren Shanghai Jiao Tong University,
University of Iowa Iowa Research Online Driving Assessment Conference 2013 Driving Assessment Conference Jun 19th, 12:00 AM Vehicle Detection Using Android Smartphones Zhiquan Ren Shanghai Jiao Tong University,
Counting Vehicles with Cameras
 Counting Vehicles with Cameras Luca Ciampi 1, Giuseppe Amato 1, Fabrizio Falchi 1, Claudio Gennaro 1, and Fausto Rabitti 1 Institute of Information, Science and Technologies of the National Research Council
Counting Vehicles with Cameras Luca Ciampi 1, Giuseppe Amato 1, Fabrizio Falchi 1, Claudio Gennaro 1, and Fausto Rabitti 1 Institute of Information, Science and Technologies of the National Research Council
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Re: Developing Requirements for Mobile LiDAR Data (#1015)
") TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
LIDAR MAPPING FACT SHEET
 1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention
 Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention Sumit Jha and Carlos Busso Multimodal Signal Processing (MSP) Laboratory Department of Electrical Engineering, The
Analyzing the Relationship Between Head Pose and Gaze to Model Driver Visual Attention Sumit Jha and Carlos Busso Multimodal Signal Processing (MSP) Laboratory Department of Electrical Engineering, The
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
SMARTATL. A Smart City Overview and Roadmap. Evanta CIO Executive Summit 1
 SMARTATL A Smart City Overview and Roadmap Evanta CIO Executive Summit 1 Southeast USA Overview Evanta CIO Executive Summit 2 Metro Atlanta Overview Evanta CIO Executive Summit 3 Permits, New Units under
SMARTATL A Smart City Overview and Roadmap Evanta CIO Executive Summit 1 Southeast USA Overview Evanta CIO Executive Summit 2 Metro Atlanta Overview Evanta CIO Executive Summit 3 Permits, New Units under
DMAC VMS (DVMS) HD Intelligent Video Management System
 HD Intelligent Video Management System") DMAC VMS (DVMS) HD Intelligent Video Management System DMAC-VMS-1CH, 4CH, 8CH, 16CH, 24CH, 32CH, 64CH, 128CH DMAC Security Video Management System (DVMS) is a High-Performance IP Video Surveillance Software
DMAC VMS (DVMS) HD Intelligent Video Management System DMAC-VMS-1CH, 4CH, 8CH, 16CH, 24CH, 32CH, 64CH, 128CH DMAC Security Video Management System (DVMS) is a High-Performance IP Video Surveillance Software
Real world data collecting tools. Company Introduction. C2L equipment.co,.ltd
 Company Introduction C2L equipment.co,.ltd www.c2l-equipment.com Company Status Business Areas Company name C2L equipment.co,.ltd Address CEO Unit 603, Samwhan HIPEX B, Pangyo Station RD 230, Bundang,
Company Introduction C2L equipment.co,.ltd www.c2l-equipment.com Company Status Business Areas Company name C2L equipment.co,.ltd Address CEO Unit 603, Samwhan HIPEX B, Pangyo Station RD 230, Bundang,
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Example of Monitoring Requirement
 CEGE Department 3DIMPact of Civil, Environmental & Geomatic Engineering (CEGE) 3D Imaging, Metrology, Photogrammetry Applied Coordinate Technologies (3DIMPact) Optical non-contact railway track measurement
CEGE Department 3DIMPact of Civil, Environmental & Geomatic Engineering (CEGE) 3D Imaging, Metrology, Photogrammetry Applied Coordinate Technologies (3DIMPact) Optical non-contact railway track measurement
Machine Vision based Data Acquisition, Processing & Automation for Subsea Inspection & Detection
 Machine Vision based Data Acquisition, Processing & Automation for Subsea Inspection & Detection 1 st Nov 2017 SUT Presentation: The Leading Edge of Value Based Subsea Inspection Adrian Boyle CEO Introduction
Machine Vision based Data Acquisition, Processing & Automation for Subsea Inspection & Detection 1 st Nov 2017 SUT Presentation: The Leading Edge of Value Based Subsea Inspection Adrian Boyle CEO Introduction
3D-2D Laser Range Finder calibration using a conic based geometry shape
 3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION
 2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Multiple Vehicle Detection and Tracking from Surveillance Camera with Collision Prediction
 http://excel.fit.vutbr.cz Multiple Vehicle Detection and Tracking from Surveillance Camera with Collision Prediction Martin Kruta k* Abstract This paper describes a system for detection and tracking of
http://excel.fit.vutbr.cz Multiple Vehicle Detection and Tracking from Surveillance Camera with Collision Prediction Martin Kruta k* Abstract This paper describes a system for detection and tracking of
Kondo GNANVO Florida Institute of Technology, Melbourne FL
 Kondo GNANVO Florida Institute of Technology, Melbourne FL OUTLINE Development of AMORE software for online monitoring and data analysis of MT station Preliminary cosmic data results from triple-gem chambers
Kondo GNANVO Florida Institute of Technology, Melbourne FL OUTLINE Development of AMORE software for online monitoring and data analysis of MT station Preliminary cosmic data results from triple-gem chambers
(Deep) Learning for Robot Perception and Navigation. Wolfram Burgard
 Learning for Robot Perception and Navigation. Wolfram Burgard") (Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
(Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Critical Assessment of Automatic Traffic Sign Detection Using 3D LiDAR Point Cloud Data
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 Critical Assessment of Automatic Traffic Sign Detection Using 3D LiDAR Point Cloud Data Chengbo Ai PhD Student School of Civil and Environmental Engineering
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 Critical Assessment of Automatic Traffic Sign Detection Using 3D LiDAR Point Cloud Data Chengbo Ai PhD Student School of Civil and Environmental Engineering
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Virginia Connected Corridor
 Virginia Connected Corridor NATMEC 2016 Mike Mollenhauer Director, Center for Technology Implementation Virginia Tech Transportation Institute 5/4/2016 Virginia Connected Corridor In 2014, VDOT and VTTI
Virginia Connected Corridor NATMEC 2016 Mike Mollenhauer Director, Center for Technology Implementation Virginia Tech Transportation Institute 5/4/2016 Virginia Connected Corridor In 2014, VDOT and VTTI
Geo-location and recognition of electricity distribution assets by analysis of ground-based imagery
 Geo-location and recognition of electricity distribution assets by analysis of ground-based imagery Andrea A. Mammoli Professor, Mechanical Engineering, University of New Mexico Thomas P. Caudell Professor
Geo-location and recognition of electricity distribution assets by analysis of ground-based imagery Andrea A. Mammoli Professor, Mechanical Engineering, University of New Mexico Thomas P. Caudell Professor
DERIVING PEDESTRIAN POSITIONS FROM UNCALIBRATED VIDEOS
 DERIVING PEDESTRIAN POSITIONS FROM UNCALIBRATED VIDEOS Zoltan Koppanyi, Post-Doctoral Researcher Charles K. Toth, Research Professor The Ohio State University 2046 Neil Ave Mall, Bolz Hall Columbus, OH,
DERIVING PEDESTRIAN POSITIONS FROM UNCALIBRATED VIDEOS Zoltan Koppanyi, Post-Doctoral Researcher Charles K. Toth, Research Professor The Ohio State University 2046 Neil Ave Mall, Bolz Hall Columbus, OH,
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
2/19/2018. Who are we? Who am I? What is Scanning? How does scanning work? How does scanning work? Scanning for Today s Surveyors
 2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Columbus Regional Signal System
 Columbus Regional Signal System Identifying need for system upgrade Existing proprietary systems that had surpassed their design life Limited signal coordination and traffic monitoring ability Older character
Columbus Regional Signal System Identifying need for system upgrade Existing proprietary systems that had surpassed their design life Limited signal coordination and traffic monitoring ability Older character
3D Shape Modeling by Deformable Models. Ye Duan
 3D Shape Modeling by Deformable Models Ye Duan Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing. Vertebral Dataset Vertebral
3D Shape Modeling by Deformable Models Ye Duan Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing. Vertebral Dataset Vertebral
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
APPENDIX C SOURCES & REFERENCES CITED
 APPENDIX C SOURCES & REFERENCES CITED Sources & References Cited Chapter 1 City of Minneapolis. 2007. Access Minneapolis Ten Year Transportation Action Plan. Connetics Transportation Group. 2012. Transit
APPENDIX C SOURCES & REFERENCES CITED Sources & References Cited Chapter 1 City of Minneapolis. 2007. Access Minneapolis Ten Year Transportation Action Plan. Connetics Transportation Group. 2012. Transit
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
2/9/2016. Session Agenda: Implementing new Geospatial Technologies for more efficient data capture
 Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
MODULE 1 BASIC LIDAR TECHNIQUES
 MODULE SCENARIO One of the first tasks a geographic information systems (GIS) department using lidar data should perform is to check the quality of the data delivered by the data provider. The department
MODULE SCENARIO One of the first tasks a geographic information systems (GIS) department using lidar data should perform is to check the quality of the data delivered by the data provider. The department
Time-Awareness in the Internet of Things. ITSF 2014 Marc Weiss, NIST Consultant
 Time-Awareness in the Internet of Things ITSF 2014 Marc Weiss, NIST Consultant mweiss@nist.gov ++1-303-497-3261 Cisco White Paper GE White Paper Energy Saving (I2E) Defense Predictive maintenance Enable
Time-Awareness in the Internet of Things ITSF 2014 Marc Weiss, NIST Consultant mweiss@nist.gov ++1-303-497-3261 Cisco White Paper GE White Paper Energy Saving (I2E) Defense Predictive maintenance Enable
MAASTO TPIMS Systems Engineering Analysis. Documentation
 MAASTO TPIMS Project MAASTO TPIMS Systems Engineering Analysis Documentation Date: November 18, 2016 Subject: MAASTO TPIMS Systems Engineering Analysis and Supplementary Project Documentation Summary Introduction
MAASTO TPIMS Project MAASTO TPIMS Systems Engineering Analysis Documentation Date: November 18, 2016 Subject: MAASTO TPIMS Systems Engineering Analysis and Supplementary Project Documentation Summary Introduction
Traffic Congestion Model: Challenges and Opportunities
 Traffic Congestion Model: Challenges and Opportunities M.D. Enjat Munajat 1, Rinaldi Munir 2 Dwi H. Widyantoro 3, School of Electrical Engineering and Informatics Institute of Technology Bandung, Email:
Traffic Congestion Model: Challenges and Opportunities M.D. Enjat Munajat 1, Rinaldi Munir 2 Dwi H. Widyantoro 3, School of Electrical Engineering and Informatics Institute of Technology Bandung, Email:
V-Sentinel: A Novel Framework for Situational Awareness and Surveillance
 V-Sentinel: A Novel Framework for Situational Awareness and Surveillance Suya You Integrated Media Systems Center Computer Science Department University of Southern California March 2005 1 Objective Developing
V-Sentinel: A Novel Framework for Situational Awareness and Surveillance Suya You Integrated Media Systems Center Computer Science Department University of Southern California March 2005 1 Objective Developing
Segmentation of 3D Photogrammetric Point Cloud for 3D Building Modeling
 Segmentation of 3D Photogrammetric Point Cloud for 3D Building Modeling EMRE ÖZDEMİR 1,2, Fabio Remondino 1 1 3D Optical Metrology unit Bruno Kessler Foundation (FBK) Trento, Italy https://3dom.fbk.eu
Segmentation of 3D Photogrammetric Point Cloud for 3D Building Modeling EMRE ÖZDEMİR 1,2, Fabio Remondino 1 1 3D Optical Metrology unit Bruno Kessler Foundation (FBK) Trento, Italy https://3dom.fbk.eu
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS INTRODUCTION
 DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
DETECTION AND ROBUST ESTIMATION OF CYLINDER FEATURES IN POINT CLOUDS Yun-Ting Su James Bethel Geomatics Engineering School of Civil Engineering Purdue University 550 Stadium Mall Drive, West Lafayette,
Text Block Detection and Segmentation for Mobile Robot Vision System Applications
 Proc. of Int. Conf. onmultimedia Processing, Communication and Info. Tech., MPCIT Text Block Detection and Segmentation for Mobile Robot Vision System Applications Too Boaz Kipyego and Prabhakar C. J.
Proc. of Int. Conf. onmultimedia Processing, Communication and Info. Tech., MPCIT Text Block Detection and Segmentation for Mobile Robot Vision System Applications Too Boaz Kipyego and Prabhakar C. J.
PRELIMINARY RESULTS ON REAL-TIME 3D FEATURE-BASED TRACKER 1. We present some preliminary results on a system for tracking 3D motion using
 PRELIMINARY RESULTS ON REAL-TIME 3D FEATURE-BASED TRACKER 1 Tak-keung CHENG derek@cs.mu.oz.au Leslie KITCHEN ljk@cs.mu.oz.au Computer Vision and Pattern Recognition Laboratory, Department of Computer Science,
PRELIMINARY RESULTS ON REAL-TIME 3D FEATURE-BASED TRACKER 1 Tak-keung CHENG derek@cs.mu.oz.au Leslie KITCHEN ljk@cs.mu.oz.au Computer Vision and Pattern Recognition Laboratory, Department of Computer Science,
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological