Imagining the Unseen: Stability-based Cuboid Arrangements for Scene Understanding
|
|
|
- Alicia Mason
- 5 years ago
- Views:
Transcription



1 : Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao* Aron Monszpart Youyi Zheng Bongjin Koo Weiwei Xu Kun Zhou * Niloy J. Mitra *


2 Background A fundamental problem for single view data acquisition Missing observations due to scene occlusion Limiting the understanding of indoor scenes From the capture view From another view
3 How do We Imagine Unseen Data?
4 How do We Imagine Unseen Data?


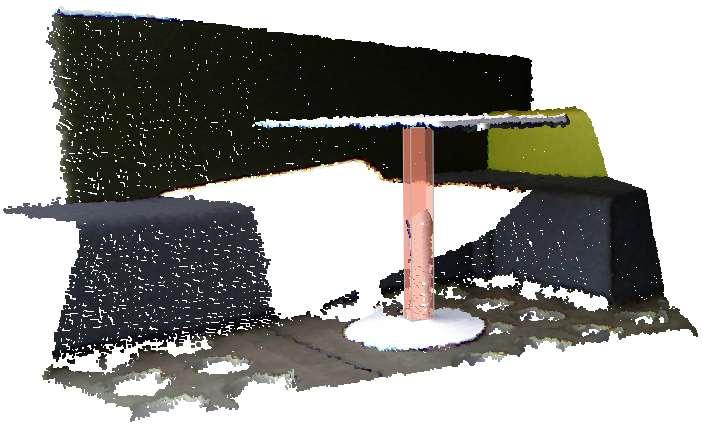

5 Our Motivation Mimic the process of human s imagination based on physical stability
6 Our Motivation Physical stability can help to reason about the scene structure Relationship among parts touching or fixed


![2013] Creating abstracted geometry](/docs-images/94/120600644/images/7-2.jpg "[Arikan et al.")
![2013] Studying spatial layout [Gupta](/docs-images/94/120600644/images/7-3.jpg "et al. 2010] [Lee et al.")
7 Related Works: Proxy-based Scene Understanding Structured output of primitives [Li et al. 2011] [Lafarge et al. 2013] Creating abstracted geometry [Arikan et al. 2013] Studying spatial layout [Gupta et al. 2010] [Lee et al. 2010] [Hartley et al. 2012] Image manipulation [Zheng et al. 2012]



8 Related Works: Cuboid Detection Statistical deformable cuboid model [Fidler et al. 2012] Cuboid corner point model [Xiao et al. 2012] Image space contrast-based features [Hedau et al. 2012]


![2010] [Jiang and Xiao](/docs-images/94/120600644/images/9-2.jpg "2013] Improve")
![segmentation [Jia 2013]](/docs-images/94/120600644/images/9-3.jpg "Voxel-based scene parsing")
9 Related Works: Physical Validity Constraints Penetration free [Hedau et al. 2010] [Jiang and Xiao 2013] Improve segmentation [Jia et al. 2013] Voxel-based scene parsing [Zheng et al. 2013] [Kim et al. 2013]
10 Our Goal Recover the underlying structure of indoor scenes Abstracting indoor scenes as collections of cuboids Hallucinate geometry in the occluded regions Identifying part parameters (size and orientation) Identifying part relations (touching or fixed)
11 Algorithm Overview



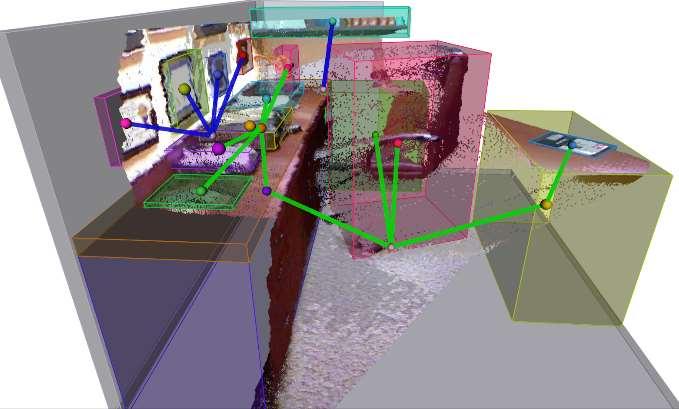
12 Algorithm Overview Input scan Initial cuboids Optimized cuboids + recovered structure
13 Algorithm Overview Input scan Initial cuboids Optimized cuboids + recovered structure




14 A B C D E G Inferring Geometry and Relations Key observation: relations are coupled with geometry G supports A & E; E supports B & C & D G supports E; E supports A & C & D; C supports B Optimized geometry Optimized geometry

 a b e ab 2 a e ab 1 e")
15 Inferring Geometry and Relations Encode the discrete interaction among the cuboids as a multiconnection graph G V, E V: cuboids; E: contact types (and corresponding cuboid extensions) a b e ab 2 a e ab 1 e ab 0 b e ab 3
16 Inferring Geometry and Relations Optimization formulation Edge selection problem x ij k = 1: edge type e ij k selected; x ij k = 0: not selected. Goal: Physically stable arrangement of cuboids with minimal number of fixed contacts min xij k #(e ij k = fixed joint) Constraints: k x ij k = 1 e ab 2 a e ab 1 e ab 0 b e ab 3

17 Inferring Geometry and Relations Pruning the solution space Pre-pruning Penetration check Visibility check
18 Inferring Geometry and Relations Pruning the solution space Pre-pruning Penetration check Visibility check Branch-and-bound Most stable

19 Inferring Geometry and Relations Assessing physical stability Local reasoning is not enough
20 Inferring Geometry and Relations Measuring global stability through static equilibrium The net force and torque should be zero Decompose the contact forces to compression forces and friction forces E s A min f Df + w 2 s. t. f i n 0 and f i u, fi v < μfi n f 1 f n 2 f v 2 f 2 w f u 2 f 3
21 Overview Ground truth Metrics Robustness Validity Applications
22 Overview Ground truth Metrics Robustness Validity Applications
23 Evaluation Ground Truth
24 Evaluation Ground Truth 20 scenes High occlusion 3 dimensions measured by hand
25 Evaluation Ground Truth Fixed Touching 20 scenes High occlusion 3 dimensions measured by hand 700 scenes (NYU2) Medium occlusion Cuboids, floors, walls Support graph Initialization
26 Evaluation Ground Truth Fixed Touching 20 scenes High occlusion 3 dimensions measured by hand 700 scenes (NYU2) Medium occlusion Online: 720 scenes, annotator tool Cuboids, floors, walls Support graph Initialization
27 Overview Ground truth Metrics Robustness Validity Applications
28 Evaluation Metrics Approximation error L 1 -norm


29 Evaluation Metrics Fixed Touching Approximation error L 1 -norm Correctness of structure graph F 1 score
30 Evaluation Approximation error Initial
31 Evaluation Approximation error Initial Ground truth {err i init }

32 Evaluation Approximation error Initial Ground truth Optimized {err i init } {err i optimized }
33 Evaluation Approximation error Initial Ground truth Optimized {err i init } {err i optimized } err i init err i optimized >? 5%
34 Evaluation Approximation error Initial Ground truth Optimized {err i init } {err i optimized } err i init err i optimized >? 5% 35% 3%
35 RGB(-D) Evaluation F 1 score Ground Truth Fixed Touching
36 RGB(-D) Evaluation F 1 score Ground Truth Output Fixed Touching
37 RGB(-D) Evaluation F 1 score Ground Truth Output Fixed Touching
38 RGB(-D) Evaluation F 1 score Precision Recall TP TP + FP TP TP + FN F Precision Recall Precision + Recall Ground Truth Output Fixed Touching

39 Evaluation F 1 score RGB(-D) #Scenes Initial Optimized Synthetic NYU Own Kinfu Ground Truth Output Fixed Touching

40 Evaluation F 1 score RGB(-D) Initialization Ground Truth Fixed Touching

41 Evaluation F 1 score RGB(-D) Initialization Ground Truth Optimized Fixed Touching
42 Evaluation F 1 score RGB(-D) Initialization Ground Truth Optimized Fixed Touching
43 Overview Ground truth Metrics Robustness Validity Applications
44 Robustness to viewpoint 1 Viewpoint 1 Fixed Touching


45 Robustness to viewpoint 1 Viewpoint 1 Viewpoint 2 Fixed Touching 2

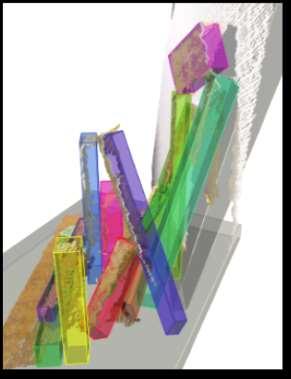
46 Robustness to scene complexity Input scene

47 Robustness to scene complexity Input cloud (back view)
48 Robustness to scene complexity Initialization
49 Robustness to scene complexity Fixed Touching Initialization Optimized Structure graph


50 Robustness to scene complexity Fixed Touching Initialization Optimized Structure graph
51 Overview Ground truth Metrics Robustness Validity Applications
52 Evaluation Validity RGB-D input Initial (side view)



53 Evaluation Validity RGB-D input Initial (side view) Optimized (side view)
54 Evaluation Validity Less occluded scan
55 Evaluation Validity Less occluded scan + Optimized


56 Evaluation Validity Less occluded scan + Optimized Extra proxies removed Front view
57 Overview Ground truth Metrics Robustness Validity Applications

58 Applications #1 Model retrieval
59 Applications #1 Model retrieval
60 Applications #1 Model retrieval
61 Applications #2 Re-arrangement





62 Applications #2 Re-arrangement
63 Applications #3 - Completion RGB-D Input

64 Applications #3 - Completion RGB-D Input Physically stable approximation
65 Applications #3 - Completion RGB-D Input Completed models
66 Applications #3 - Completion RGB-D Input Completed models
67 Limitations heterogeneous [ [GravityGlue.com]


68 Limitations Fixed Touching [ [GravityGlue.com]




69 Code + Data:

70 Robustness to initialization No perturbation 5 10
Imagining the Unseen: Stability-based Cuboid Arrangements for Scene Understanding
 Imagining the Unseen: Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao Zhejiang University Aron Monszpart University College London Youyi Zheng Yale University Bongjin Koo University
Imagining the Unseen: Stability-based Cuboid Arrangements for Scene Understanding Tianjia Shao Zhejiang University Aron Monszpart University College London Youyi Zheng Yale University Bongjin Koo University
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Support surfaces prediction for indoor scene understanding
 2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
3D-Based Reasoning with Blocks, Support, and Stability
 3D-Based Reasoning with Blocks, Support, and Stability Zhaoyin Jia, Andrew Gallagher, Ashutosh Saxena, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University. Department of Computer
3D-Based Reasoning with Blocks, Support, and Stability Zhaoyin Jia, Andrew Gallagher, Ashutosh Saxena, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University. Department of Computer
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
arxiv: v1 [cs.cv] 3 Jul 2016
![arxiv: v1 [cs.cv] 3 Jul 2016](/thumbs/95/123101257.jpg "arxiv: v1 [cs.cv] 3 Jul 2016") A Coarse-to-Fine Indoor Layout Estimation (CFILE) Method Yuzhuo Ren, Chen Chen, Shangwen Li, and C.-C. Jay Kuo arxiv:1607.00598v1 [cs.cv] 3 Jul 2016 Abstract. The task of estimating the spatial layout
A Coarse-to-Fine Indoor Layout Estimation (CFILE) Method Yuzhuo Ren, Chen Chen, Shangwen Li, and C.-C. Jay Kuo arxiv:1607.00598v1 [cs.cv] 3 Jul 2016 Abstract. The task of estimating the spatial layout
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
3D Reasoning from Blocks to Stability
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 3D Reasoning from Blocks to Stability Zhaoyin Jia, Student Member, IEEE, Andrew C. Gallagher, Senior Member, IEEE, Ashutosh Saxena, Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 3D Reasoning from Blocks to Stability Zhaoyin Jia, Student Member, IEEE, Andrew C. Gallagher, Senior Member, IEEE, Ashutosh Saxena, Member,
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization
 Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation. Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University
 Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Finding Surface Correspondences With Shape Analysis
 Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
Trademark Matching and Retrieval in Sport Video Databases
 Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Trademark Matching and Retrieval in Sport Video Databases Andrew D. Bagdanov, Lamberto Ballan, Marco Bertini and Alberto Del Bimbo {bagdanov, ballan, bertini, delbimbo}@dsi.unifi.it 9th ACM SIGMM International
Urban Scene Segmentation, Recognition and Remodeling. Part III. Jinglu Wang 11/24/2016 ACCV 2016 TUTORIAL
 Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Part III Jinglu Wang Urban Scene Segmentation, Recognition and Remodeling 102 Outline Introduction Related work Approaches Conclusion and future work o o - - ) 11/7/16 103 Introduction Motivation Motivation
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Sports Field Localization
 Sports Field Localization Namdar Homayounfar February 5, 2017 1 / 1 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and
Sports Field Localization Namdar Homayounfar February 5, 2017 1 / 1 Motivation Sports Field Localization: Have to figure out where the field and players are in 3d space in order to make measurements and
CS 558: Computer Vision 13 th Set of Notes
 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
arxiv: v3 [cs.cv] 18 Aug 2017
![arxiv: v3 [cs.cv] 18 Aug 2017](/thumbs/73/69392953.jpg "arxiv: v3 [cs.cv] 18 Aug 2017") Predicting Complete 3D Models of Indoor Scenes Ruiqi Guo UIUC, Google Chuhang Zou UIUC Derek Hoiem UIUC arxiv:1504.02437v3 [cs.cv] 18 Aug 2017 Abstract One major goal of vision is to infer physical models
Predicting Complete 3D Models of Indoor Scenes Ruiqi Guo UIUC, Google Chuhang Zou UIUC Derek Hoiem UIUC arxiv:1504.02437v3 [cs.cv] 18 Aug 2017 Abstract One major goal of vision is to infer physical models
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Depth Estimation Using Collection of Models
 Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
Depth Estimation Using Collection of Models Karankumar Thakkar 1, Viral Borisagar 2 PG scholar 1, Assistant Professor 2 Computer Science & Engineering Department 1, 2 Government Engineering College, Sector
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding
 PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding Yinda Zhang Shuran Song Ping Tan Jianxiong Xiao Princeton University Simon Fraser University Alicia Clark PanoContext October
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding Yinda Zhang Shuran Song Ping Tan Jianxiong Xiao Princeton University Simon Fraser University Alicia Clark PanoContext October
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding
 3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding Scott Satkin Google Inc satkin@googlecom Martial Hebert Carnegie Mellon University hebert@ricmuedu Abstract We present a new algorithm
3DNN: Viewpoint Invariant 3D Geometry Matching for Scene Understanding Scott Satkin Google Inc satkin@googlecom Martial Hebert Carnegie Mellon University hebert@ricmuedu Abstract We present a new algorithm
Planning, Execution and Learning Application: Examples of Planning in Perception
 15-887 Planning, Execution and Learning Application: Examples of Planning in Perception Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Graph search for perception Planning for
15-887 Planning, Execution and Learning Application: Examples of Planning in Perception Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Graph search for perception Planning for
Learning to Exploit Stability for 3D Scene Parsing
 Learning to Exploit Stability for 3D Scene Parsing Yilun Du MIT CSAIL Zhijian Liu MIT CSAIL Hector Basevi University of Birmingham Aleš Leonardis University of Birmingham William T. Freeman MIT CSAIL Joshua
Learning to Exploit Stability for 3D Scene Parsing Yilun Du MIT CSAIL Zhijian Liu MIT CSAIL Hector Basevi University of Birmingham Aleš Leonardis University of Birmingham William T. Freeman MIT CSAIL Joshua
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Local cues and global constraints in image understanding
 Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Local cues and global constraints in image understanding Olga Barinova Lomonosov Moscow State University *Many slides adopted from the courses of Anton Konushin Image understanding «To see means to know
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
P-CNN: Pose-based CNN Features for Action Recognition. Iman Rezazadeh
 P-CNN: Pose-based CNN Features for Action Recognition Iman Rezazadeh Introduction automatic understanding of dynamic scenes strong variations of people and scenes in motion and appearance Fine-grained
P-CNN: Pose-based CNN Features for Action Recognition Iman Rezazadeh Introduction automatic understanding of dynamic scenes strong variations of people and scenes in motion and appearance Fine-grained
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Scene Understanding by Reasoning Stability and Safety
 Noname manuscript No. (will be inserted by the editor) Scene Understanding by Reasoning Stability and Safety Bo Zheng Yibiao Zhao Joey Yu Katsushi Ikeuchi Song-Chun Zhu Received: date / Accepted: date
Noname manuscript No. (will be inserted by the editor) Scene Understanding by Reasoning Stability and Safety Bo Zheng Yibiao Zhao Joey Yu Katsushi Ikeuchi Song-Chun Zhu Received: date / Accepted: date
Correcting User Guided Image Segmentation
 Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Edge-Semantic Learning Strategy for Layout Estimation in Indoor Environment
 1 Edge-Semantic Learning Strategy for Layout Estimation in Indoor Environment Weidong Zhang, Student Member, IEEE, Wei Zhang, Member, IEEE, and Jason Gu, Senior Member, IEEE arxiv:1901.00621v1 [cs.cv]
1 Edge-Semantic Learning Strategy for Layout Estimation in Indoor Environment Weidong Zhang, Student Member, IEEE, Wei Zhang, Member, IEEE, and Jason Gu, Senior Member, IEEE arxiv:1901.00621v1 [cs.cv]
From 3D Scene Geometry to Human Workspace
 From 3D Scene Geometry to Human Workspace Abhinav Gupta, Scott Satkin, Alexei A. Efros and Martial Hebert The Robotics Institute, Carnegie Mellon University {abhinavg,ssatkin,efros,hebert}@ri.cmu.edu Abstract
From 3D Scene Geometry to Human Workspace Abhinav Gupta, Scott Satkin, Alexei A. Efros and Martial Hebert The Robotics Institute, Carnegie Mellon University {abhinavg,ssatkin,efros,hebert}@ri.cmu.edu Abstract
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
arxiv: v1 [cs.cv] 23 Mar 2018
![arxiv: v1 [cs.cv] 23 Mar 2018](/thumbs/80/81847201.jpg "arxiv: v1 [cs.cv] 23 Mar 2018") LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image Chuhang Zou Alex Colburn Qi Shan Derek Hoiem University of Illinois at Urbana-Champaign Zillow Group {czou4, dhoiem}@illinois.edu {alexco,
LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image Chuhang Zou Alex Colburn Qi Shan Derek Hoiem University of Illinois at Urbana-Champaign Zillow Group {czou4, dhoiem}@illinois.edu {alexco,
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments
 Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments Kun Huang, Yifan Wang, Zihan Zhou 2, Tianjiao Ding, Shenghua Gao, and Yi Ma 3 ShanghaiTech University {huangkun,
Supplementary Materials for Learning to Parse Wireframes in Images of Man-Made Environments Kun Huang, Yifan Wang, Zihan Zhou 2, Tianjiao Ding, Shenghua Gao, and Yi Ma 3 ShanghaiTech University {huangkun,
Geometric-Edge Random Graph Model for Image Representation
 Geometric-Edge Random Graph Model for Image Representation Bo JIANG, Jin TANG, Bin LUO CVPR Group, Anhui University /1/11, Beijing Acknowledgements This research is supported by the National Natural Science
Geometric-Edge Random Graph Model for Image Representation Bo JIANG, Jin TANG, Bin LUO CVPR Group, Anhui University /1/11, Beijing Acknowledgements This research is supported by the National Natural Science
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
3D Spatial Layout Propagation in a Video Sequence
 3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
Irradiance Gradients. Media & Occlusions
 Irradiance Gradients in the Presence of Media & Occlusions Wojciech Jarosz in collaboration with Matthias Zwicker and Henrik Wann Jensen University of California, San Diego June 23, 2008 Wojciech Jarosz
Irradiance Gradients in the Presence of Media & Occlusions Wojciech Jarosz in collaboration with Matthias Zwicker and Henrik Wann Jensen University of California, San Diego June 23, 2008 Wojciech Jarosz
3D Scene Understanding by Voxel-CRF
 3D Scene Understanding by Voxel-CRF Byung-soo Kim University of Michigan bsookim@umich.edu Pushmeet Kohli Microsoft Research Cambridge pkohli@microsoft.com Silvio Savarese Stanford University ssilvio@stanford.edu
3D Scene Understanding by Voxel-CRF Byung-soo Kim University of Michigan bsookim@umich.edu Pushmeet Kohli Microsoft Research Cambridge pkohli@microsoft.com Silvio Savarese Stanford University ssilvio@stanford.edu
Scalable Object Classification using Range Images
 Scalable Object Classification using Range Images Eunyoung Kim and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California 1 What is a Range Image? Depth measurement
Scalable Object Classification using Range Images Eunyoung Kim and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California 1 What is a Range Image? Depth measurement
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Symmetry Detection Competition
 Symmetry Detection Competition Evaluation Details PART II: Translation Symmetries Ingmar Rauschert 1 Translation Symmetry 2 Translation Symmetry Translation symmetries considered 1D: Frieze Pattern 2D:
Symmetry Detection Competition Evaluation Details PART II: Translation Symmetries Ingmar Rauschert 1 Translation Symmetry 2 Translation Symmetry Translation symmetries considered 1D: Frieze Pattern 2D:
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
FPM: Fine Pose Parts-Based Model with 3D CAD Models
 FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
Recurrent Transformer Networks for Semantic Correspondence
 Neural Information Processing Systems (NeurIPS) 2018 Recurrent Transformer Networks for Semantic Correspondence Seungryong Kim 1, Stepthen Lin 2, Sangryul Jeon 1, Dongbo Min 3, Kwanghoon Sohn 1 Dec. 05,
Neural Information Processing Systems (NeurIPS) 2018 Recurrent Transformer Networks for Semantic Correspondence Seungryong Kim 1, Stepthen Lin 2, Sangryul Jeon 1, Dongbo Min 3, Kwanghoon Sohn 1 Dec. 05,
3DNN: 3D Nearest Neighbor
 Int J Comput Vis (2015) 111:69 97 DOI 10.1007/s11263-014-0734-4 3DNN: 3D Nearest Neighbor Data-Driven Geometric Scene Understanding Using 3D Models Scott Satkin Maheen Rashid Jason Lin Martial Hebert Received:
Int J Comput Vis (2015) 111:69 97 DOI 10.1007/s11263-014-0734-4 3DNN: 3D Nearest Neighbor Data-Driven Geometric Scene Understanding Using 3D Models Scott Satkin Maheen Rashid Jason Lin Martial Hebert Received:
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
Unfolding an Indoor Origami World
 Unfolding an Indoor Origami World David F. Fouhey, Abhinav Gupta, and Martial Hebert The Robotics Institute, Carnegie Mellon University Abstract. In this work, we present a method for single-view reasoning
Unfolding an Indoor Origami World David F. Fouhey, Abhinav Gupta, and Martial Hebert The Robotics Institute, Carnegie Mellon University Abstract. In this work, we present a method for single-view reasoning
Many rendering scenarios, such as battle scenes or urban environments, require rendering of large numbers of autonomous characters.
 1 2 Many rendering scenarios, such as battle scenes or urban environments, require rendering of large numbers of autonomous characters. Crowd rendering in large environments presents a number of challenges,
1 2 Many rendering scenarios, such as battle scenes or urban environments, require rendering of large numbers of autonomous characters. Crowd rendering in large environments presents a number of challenges,
Understanding Indoor Scenes using 3D Geometric Phrases
 23 IEEE Conference on Computer Vision and Pattern Recognition Understanding Indoor Scenes using 3D Geometric Phrases Wongun Choi, Yu-Wei Chao, Caroline Pantofaru 2, and Silvio Savarese University of Michigan,
23 IEEE Conference on Computer Vision and Pattern Recognition Understanding Indoor Scenes using 3D Geometric Phrases Wongun Choi, Yu-Wei Chao, Caroline Pantofaru 2, and Silvio Savarese University of Michigan,
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Georgios (George) Papaioannou
 Papaioannou") Georgios (George) Papaioannou Dept. of Computer Science Athens University of Economics & Business HPG 2011 Motivation Why build yet another RTGI method? Significant number of existing techniques RSM, CLPV,
Georgios (George) Papaioannou Dept. of Computer Science Athens University of Economics & Business HPG 2011 Motivation Why build yet another RTGI method? Significant number of existing techniques RSM, CLPV,
Learning to Grasp Objects: A Novel Approach for Localizing Objects Using Depth Based Segmentation
 Learning to Grasp Objects: A Novel Approach for Localizing Objects Using Depth Based Segmentation Deepak Rao, Arda Kara, Serena Yeung (Under the guidance of Quoc V. Le) Stanford University Abstract We
Learning to Grasp Objects: A Novel Approach for Localizing Objects Using Depth Based Segmentation Deepak Rao, Arda Kara, Serena Yeung (Under the guidance of Quoc V. Le) Stanford University Abstract We
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
GAN Related Works. CVPR 2018 & Selective Works in ICML and NIPS. Zhifei Zhang
 GAN Related Works CVPR 2018 & Selective Works in ICML and NIPS Zhifei Zhang Generative Adversarial Networks (GANs) 9/12/2018 2 Generative Adversarial Networks (GANs) Feedforward Backpropagation Real? z
GAN Related Works CVPR 2018 & Selective Works in ICML and NIPS Zhifei Zhang Generative Adversarial Networks (GANs) 9/12/2018 2 Generative Adversarial Networks (GANs) Feedforward Backpropagation Real? z
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Let s start with occluding contours (or interior and exterior silhouettes), and look at image-space algorithms. A very simple technique is to render
, and look at image-space algorithms. A very simple technique is to render") 1 There are two major classes of algorithms for extracting most kinds of lines from 3D meshes. First, there are image-space algorithms that render something (such as a depth map or cosine-shaded model),
1 There are two major classes of algorithms for extracting most kinds of lines from 3D meshes. First, there are image-space algorithms that render something (such as a depth map or cosine-shaded model),
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Structured Attention Networks
 Structured Attention Networks Yoon Kim Carl Denton Luong Hoang Alexander M. Rush HarvardNLP ICLR, 2017 Presenter: Chao Jiang ICLR, 2017 Presenter: Chao Jiang 1 / Outline 1 Deep Neutral Networks for Text
Structured Attention Networks Yoon Kim Carl Denton Luong Hoang Alexander M. Rush HarvardNLP ICLR, 2017 Presenter: Chao Jiang ICLR, 2017 Presenter: Chao Jiang 1 / Outline 1 Deep Neutral Networks for Text
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Understanding Bayesian rooms using composite 3D object models
 2013 IEEE Conference on Computer Vision and Pattern Recognition Understanding Bayesian rooms using composite 3D object models Luca Del Pero Joshua Bowdish Bonnie Kermgard Emily Hartley Kobus Barnard University
2013 IEEE Conference on Computer Vision and Pattern Recognition Understanding Bayesian rooms using composite 3D object models Luca Del Pero Joshua Bowdish Bonnie Kermgard Emily Hartley Kobus Barnard University
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Deformable Segmentation using Sparse Shape Representation. Shaoting Zhang
 Deformable Segmentation using Sparse Shape Representation Shaoting Zhang Introduction Outline Our methods Segmentation framework Sparse shape representation Applications 2D lung localization in X-ray 3D
Deformable Segmentation using Sparse Shape Representation Shaoting Zhang Introduction Outline Our methods Segmentation framework Sparse shape representation Applications 2D lung localization in X-ray 3D
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image
 LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image Chuhang Zou Alex Colburn Qi Shan Derek Hoiem University of Illinois at Urbana-Champaign Zillow Group {czou4, dhoiem}@illinois.edu {alexco,
LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image Chuhang Zou Alex Colburn Qi Shan Derek Hoiem University of Illinois at Urbana-Champaign Zillow Group {czou4, dhoiem}@illinois.edu {alexco,
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D)
") INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D) PhD Research Proposal 2015-2016 Promoter: Prof. Dr. Ir. George
INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D) PhD Research Proposal 2015-2016 Promoter: Prof. Dr. Ir. George
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction
 Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards