Geosmart Asia Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency. Thomas Gaisecker. April, 2018
|
|
|
- Donald Jackson
- 5 years ago
- Views:
Transcription




1 Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018
2 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard Realtime Postprocessing Tasks Onboard Registration 2.0 leaving the scene with a registered point-cloud Example data from different applications

3 RIEGL VZ-scanner overview VZ-400 VZ-400 VZ-1000 VZ-1000 VZ-2000 VZ-4000 VZ-4000 VZ-6000 VZ-6000 max. range max. 600m range max. 600m range max. 1400m range max. 1400m range max. 2050m range max. 4000m range max. 4000m range max. 6000m range 6000m precision 3mm precision precision 3mm 5mm precision 5mm precision 5mm precision 10mm precision 10mm precision 10mm precision 10mm accuracy 5mm accuracy accuracy 5mm 8mm accuracy 8mm accuracy 8mm accuracy 15mm accuracy 15mm accuracy 15mm accuracy 15mm Laser Class Laser 1 Class Laser 1 Class Laser 1 Class Laser 1 Class Laser 1 Class Laser 1 Class 1 Laser Class Laser 3B Class 3B

4 continuous developments on VZ-platform Improvment Camera Mount Compass Integration Integration Additional Sensors Add On Akku Integration External GNSS RIEGL VMZ-System Automatic Reflector Search Automatic Backsighting/Foresighting Full Waveform Data Output



 multiple-time")


5 RIEGL VZ-400i / VZ-2000i key features pulse repetition rate up to 1,2MHz effect. meas. rate up to /sec. max. range 800m (VZ-400i), 2500m (VZ-2000i) multiple-time around capability line speed 240 lines/sec. frame speed 150 /sec. cloud connectivity executing post-processing tasks

6 additional processing power RIEGL VZ-400 / VZ-1000 / VZ-2000 single-core processor running at 470 MHz DMIPS 900 DMIPS RIEGL VZ-400i / VZ-2000i dual-core processor running at 660 MHz DMIPS 3300 DMIPS
7 additional processing power RIEGL VZ-400 / VZ-1000 / VZ-2000 single-core processor running at 470 MHz DMIPS 900 DMIPS 0 10,000 20,000 30,000 40,000 50,000 RIEGL VZ-400i / VZ-2000i dual-core processor running at 660 MHz DMIPS 3,300 DMIPS 0 10,000 20,000 30,000 40,000 50,000 RIEGL VZ-400i / VZ-2000i LIDAR system quad-core up to 2.2 GHz 0 10,000 20,000 30,000 40,000 50,000 DMIPS GPU with 192 cores running at up to 850 MHz 30,000 DMIPS
8 firmware/software architecture VZ-400i VZ-400i LIDAR / VZ-2000i engine LIDAR engine firmware computational resources 660 MHz high performance IP cores main tasks echo digitization online waveform processing data attributes data stream compression housekeeping and control VZ-400i / VZ-2000i LIDAR system software computational resources 2200 MHz GPU MHz main tasks LIDAR engine commanding graphical user interface acquisition & processing of camera images GNSS data pose sensor data managing interface executing post-processing tasks
9 VZ-400i / VZ-2000i LIDAR System software post-processor runs libraries and executables RDBLibrary as used by RiSCAN PRO Creates point cloud database spatially sorted data compression level-of-detail (LOD) supporting arbitrary attributes enables e.g. visualization of large point clouds on tablets or on remote clients via low-bandwidth connections



10 VZ-400i / VZ-2000i LIDAR System software post-processor runs libraries and executables RDBLibrary RiMTA-TLS solving range ambiguities caused by high pulse repitition rate



11 VZ-400i / VZ-2000i LIDAR System software post-processor runs libraries and executables RDBLibrary RiMTA-TLS Registration Module by in-built sensors (GNSS, IMU, Compass) by automatic registration module 2.0 unregistered by in-built sensors Registration 2.0

12 Automatic Onboard Registration pre-registration by onboard sensors outdoor GNSS data - position IMU data - roll/pitch magnetic compass - yaw indoor first position user defined relative position and orientation by trajectory from IMU data



13 Automatic Onboard Registration 1 st level registration by automatic voxel extraction and fitting scan-data voxels voxels with reflectance voxel classification - unregular - plane object - linear object voxel visualisation by class



14 Automatic Onboard Registration 2 nd level registration by automatic plane extraction and fitting scan-data planes normal vectors planes - size planes number of points planes standard deviation



15 Automatic Onboard Registration Example Ice Cave 2 days data acquisition 370 scan-positions more than 5billion measurements extreme high registration quality 0 mm 0 mm 5 mm 10 mm 5 mm 10 mm
16 Automatic Onboard Registration Example Ice Cave

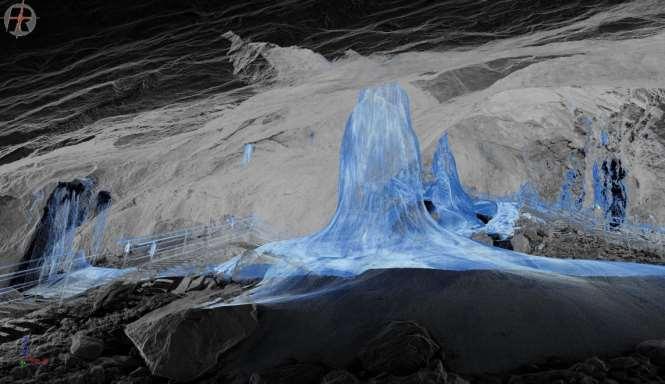

17 Automatic Onboard Registration Example Ice Cave

18 Automatic Onboard Registration Example City Scans 500 scan-positions 8h data acquisition


19 VZ-400i / VZ-2000i LIDAR System software post-processor runs libraries and executables RDBLibrary RiMTA-TLS Registration Module GeoSysManager online EPSG database access fully customizable definitions Import/Export of any well-defined Coordinate Reference System



20 VZ-400i / VZ-2000i LIDAR System software post-processor runs libraries and executables RDBLibrary RiMTA-TLS Registration Module GeoSysManager

21 VZ-400i / VZ-2000i LIDAR System software post-processor runs libraries and executables RDBLibrary RiMTA-TLS Registration Module GeoSysManager Customizing your Scanner with APPS Files - File Browser for data transfer between int. harddrive, SD-card, and USB-stick Uploads - Tool for uploading data into the cloud RiMOTE Tool for scanner remote control Tasks lists and shows progress of tasks running in the background Registration Tool for onboard automatic registration Scheduler Tool for planning and scheduling scans Timer simple tool for acquiring scans every xx seconds Screenshot creates screenshots of the GUI every xx seconds
22 VZ-400i / VZ-2000i LIDAR System software RDBLibrary rawdata to 3d pointcloud processing RiMTA-TLS solving range ambiguities Registration Module combining scandata in one PRCS (Project Coordinate System) GeoSysManager transformation into any CRS (Coordinate Reference System) On Board Apps. customizing the scanner according to your demands
RIEGL VZ-400i. Digital Information in 3D Innovations and Best Practises. 4th to 5th of November, Prince Philip House, London
 RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
Innovation in 3D. Product Overview
 Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Terrasolid European Training Event
 Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR
 Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
WELCOME. A High-Tech Company introducing itself. to a short presentation of RIEGL Laser Measurement Systems GmbH
 WELCOME A High-Tech Company introducing itself to a short presentation of RIEGL Laser Measurement Systems RIEGL Laser Measurement Systems GmbH With more than 30 years experience in the research, development
WELCOME A High-Tech Company introducing itself to a short presentation of RIEGL Laser Measurement Systems RIEGL Laser Measurement Systems GmbH With more than 30 years experience in the research, development
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
Hardware 3D Mapping Systems
 Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
LAS extrabytes implementation in RIEGL software WHITEPAPER
 in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
TLS Data Processing and Exploration Manual
 Katherine Shervais (UNAVCO), Marin Clark (University of Michigan) Collecting data in the field is only the first step in the complete TLS workflow. This manual will take you through the skills needed to
Katherine Shervais (UNAVCO), Marin Clark (University of Michigan) Collecting data in the field is only the first step in the complete TLS workflow. This manual will take you through the skills needed to
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z420i
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
FIELD OPERATION CENTER Coastal Hydraulics Lab. Field Data Collection and Analysis Branch Our Team Members
 FIELD OPERATION CENTER Coastal Hydraulics Lab Field Data Collection and Analysis Branch Our Team Members Mobile/Static LIDAR and Photogrammetry Platforms and Equipment Mobile/Static LIDAR and Photogrammetry
FIELD OPERATION CENTER Coastal Hydraulics Lab Field Data Collection and Analysis Branch Our Team Members Mobile/Static LIDAR and Photogrammetry Platforms and Equipment Mobile/Static LIDAR and Photogrammetry
SpatialFuser. Offers support for GNSS and INS navigation systems. Supports multiple remote sensing equipment configurations.
 SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
NEW RIEGL. Triple Scanner Mobile Mapping System Specifically Designed for Rail Application. Typical Applications
 NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
Towards Optimal 3D Point Clouds
 By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
Laser scanners with echo digitization for full waveform analysis
 Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
BIM & Digital Transformation Scotland Live 2018 Capturing 3D Reality at the push of a button
 BIM & Digital Transformation Scotland Live 2018 Capturing 3D Reality at the push of a button Gary Kelly Country Manager Scotland Leica Geosystems @LeicaScot Capturing 3D Reality at the push of a button
BIM & Digital Transformation Scotland Live 2018 Capturing 3D Reality at the push of a button Gary Kelly Country Manager Scotland Leica Geosystems @LeicaScot Capturing 3D Reality at the push of a button
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
VMX -2HA RIEGL. High Speed, High Performance Dual Scanner Mobile Mapping System. Typical Applications
 RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
RaceCapture/Apex. Ruggedized, powerful motorsports telemetry
 RaceCapture/Apex Ruggedized, powerful motorsports telemetry RaceCapture/Apex is a powerful motorsports telemetry system designed for harsh environments. Whether you need telemetry for your open-cockpit
RaceCapture/Apex Ruggedized, powerful motorsports telemetry RaceCapture/Apex is a powerful motorsports telemetry system designed for harsh environments. Whether you need telemetry for your open-cockpit
V-PANE Virtual Perspectives Augmenting Natural Experiences
 V-PANE Virtual Perspectives Augmenting Natural Experiences GTC 2017 The views, opinions and/or findings expressed are those of the author(s) and should not be interpreted as representing the official views
V-PANE Virtual Perspectives Augmenting Natural Experiences GTC 2017 The views, opinions and/or findings expressed are those of the author(s) and should not be interpreted as representing the official views
Leica BLK360 Questions & Answers. Vers
 Questions & Answers Vers. 11.01.2017 What is it? 2 What is it? 3 What is it? Calibrated full spherical image, LED flash support 4 What is it? 5 A new, simple way to capture reality Speed On-the-fly image
Questions & Answers Vers. 11.01.2017 What is it? 2 What is it? 3 What is it? Calibrated full spherical image, LED flash support 4 What is it? 5 A new, simple way to capture reality Speed On-the-fly image
ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS
 ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS M. Doneus a,b *, C. Briese a,c, N. Studnicka d a Ludwig Boltzmann Institute for
ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS M. Doneus a,b *, C. Briese a,c, N. Studnicka d a Ludwig Boltzmann Institute for
Artec Leo. A smart professional 3D scanner for a next-generation user experience
 Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design Easy
Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design Easy
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Multisensoral UAV-Based Reference Measurements for Forestry Applications
 Multisensoral UAV-Based Reference Measurements for Forestry Applications Research Manager D.Sc. Anttoni Jaakkola Centre of Excellence in Laser Scanning Research 2 Outline UAV applications Reference level
Multisensoral UAV-Based Reference Measurements for Forestry Applications Research Manager D.Sc. Anttoni Jaakkola Centre of Excellence in Laser Scanning Research 2 Outline UAV applications Reference level
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
RaceCapture/Pro 3. Next generation of data, telemetry, and control. Live-streaming to Podium
 RaceCapture/Pro 3 Next generation of data, telemetry, and control Your time on track matters and you want to maximize every minute and dollar toward tuning the engine, honing your racecraft, or finding
RaceCapture/Pro 3 Next generation of data, telemetry, and control Your time on track matters and you want to maximize every minute and dollar toward tuning the engine, honing your racecraft, or finding
RIEGL VMX-450. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Data Integration in Building Virtual Models
 Data Integration in Building Virtual Models Erik Singels, Geospatial Information Sciences Program Brent Vollmar, Department of Geosciences Adewale Okunoren, Department of Geosciences Carlos L. V. Aiken,
Data Integration in Building Virtual Models Erik Singels, Geospatial Information Sciences Program Brent Vollmar, Department of Geosciences Adewale Okunoren, Department of Geosciences Carlos L. V. Aiken,
TCM-5311 Configuration Advice for Indoor and
 ACTi Knowledge Base Category: Installation & Configuration Note Sub-category: Video Quality, Application Model: TCM-5311 Firmware: 4.06.09 Software: N/A Published: 2009/08/24 Reviewed: 2009/12/09 TCM-5311
ACTi Knowledge Base Category: Installation & Configuration Note Sub-category: Video Quality, Application Model: TCM-5311 Firmware: 4.06.09 Software: N/A Published: 2009/08/24 Reviewed: 2009/12/09 TCM-5311
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying. IR laser scanner channel OCTOBER 2015
 RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
U9 Talk DDNS Server Instruction. -- Cloud Intercom
 U9 Talk DDNS Server Instruction -- Cloud Intercom Install Software 1. Install the software U9TalkServer DDNS V1.33 Download link http://url.cn/2ith7og 2. Double click the shortcut of the software to run
U9 Talk DDNS Server Instruction -- Cloud Intercom Install Software 1. Install the software U9TalkServer DDNS V1.33 Download link http://url.cn/2ith7og 2. Double click the shortcut of the software to run
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
LOAM: LiDAR Odometry and Mapping in Real Time
 LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors
 33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
UAS based laser scanning for forest inventory and precision farming
 UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
Leica Pegasus: Backpack
 Leica Pegasus: Backpack Fast Acquisition Accurate data Indoor/Outdoor projects Pegasus:Backpack Simple workflow Everything, Everywhere 1 Leica Pegasus: Backpack Award Winning System Remarks Multiple Award
Leica Pegasus: Backpack Fast Acquisition Accurate data Indoor/Outdoor projects Pegasus:Backpack Simple workflow Everything, Everywhere 1 Leica Pegasus: Backpack Award Winning System Remarks Multiple Award
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
HIGH-PERFORMANCE LONG-RANGE LASER SCANNER WITH CALIBRATED DIGITAL CAMERA: A HYBRID 3D LASER SENSOR SYSTEM
 HIGH-PERFORMANCE LONG-RANGE LASER SCANNER WITH CALIBRATED DIGITAL CAMERA: A HYBRID 3D LASER SENSOR SYSTEM ANDREAS ULLRICH Technical Director RIEGL Laser Measurement Systems GmbH Horn, Austria www.riegl.co.at
HIGH-PERFORMANCE LONG-RANGE LASER SCANNER WITH CALIBRATED DIGITAL CAMERA: A HYBRID 3D LASER SENSOR SYSTEM ANDREAS ULLRICH Technical Director RIEGL Laser Measurement Systems GmbH Horn, Austria www.riegl.co.at
Reality Capture using: RPAS Technologies & Image Laser Scanners
 Reality Capture using: RPAS Technologies & Image Laser Scanners by Johan Erasmus (RPAS Technologies) & Barend Bornman (Image Laser Scanners) from Aciel Geomatics Laser Scanners High-Definition Surveying
Reality Capture using: RPAS Technologies & Image Laser Scanners by Johan Erasmus (RPAS Technologies) & Barend Bornman (Image Laser Scanners) from Aciel Geomatics Laser Scanners High-Definition Surveying
Datasheet. Unified Video Surveillance Management. Camera Models: UVC, UVC-Dome, UVC-Micro, UVC-Pro NVR Model: UVC-NVR
 Unified Video Surveillance Management Camera Models: UVC, UVC-Dome, UVC-Micro, UVC-Pro NVR Model: UVC-NVR Scalable Day or Night Surveillance Advanced Hardware with Full HD Video Powerful Features and Analytic
Unified Video Surveillance Management Camera Models: UVC, UVC-Dome, UVC-Micro, UVC-Pro NVR Model: UVC-NVR Scalable Day or Night Surveillance Advanced Hardware with Full HD Video Powerful Features and Analytic
Industrial 2D LASER SCANNER LMS-Q120ii
 LMS-Q120ii Preliminary Datasheet Industrial 2D LASER SCANNER LMS-Q120ii The RIEGL LMS-Q120ii 2D - laser scanner provides accurate noncontact line scanning using a narrow infrared laser beam. The instrument
LMS-Q120ii Preliminary Datasheet Industrial 2D LASER SCANNER LMS-Q120ii The RIEGL LMS-Q120ii 2D - laser scanner provides accurate noncontact line scanning using a narrow infrared laser beam. The instrument
IP-S2 HD HD IP-S2. 3D Mobile Mapping System. 3D Mobile Mapping System
 HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
3D Laser Scanner VS1000 User Manual
 3D Laser Scanner VS1000 User Manual 1 VS1000 Introduction SMART MAX GEOSYSTEMS CO., LTD VS1000 3D Laser Scanner based on pulses ranging principle, could quick acquire massive point cloud data from the
3D Laser Scanner VS1000 User Manual 1 VS1000 Introduction SMART MAX GEOSYSTEMS CO., LTD VS1000 3D Laser Scanner based on pulses ranging principle, could quick acquire massive point cloud data from the
Case studies about using Mobile Mapping System (MMS) on traffic network mapping
 on traffic network mapping") HUNGARIAN GEODETIC AND MAPPING CORPORATION LTD. Case studies about using Mobile Mapping System (MMS) on traffic network mapping Peter Csörgits Chief Engineer Hungarian Geodetic and Mapping co. Ltd. What
HUNGARIAN GEODETIC AND MAPPING CORPORATION LTD. Case studies about using Mobile Mapping System (MMS) on traffic network mapping Peter Csörgits Chief Engineer Hungarian Geodetic and Mapping co. Ltd. What
3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment
 Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Lecture 11. LiDAR, RADAR
 NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
Synchronization aspects of sensor and data fusion in a research multi-sensor-system
 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
See it. Control it. The TelPro Solution
 See it. Control it. The TelPro Solution JANUARY 2017 Introducing the TelPro Solution A combined cellular and wireless IoT gateway and cloud portal system Collection and analysis of commercial and industrial
See it. Control it. The TelPro Solution JANUARY 2017 Introducing the TelPro Solution A combined cellular and wireless IoT gateway and cloud portal system Collection and analysis of commercial and industrial
UAVs & IMAGES ACCESSORIES ABOUT GEXCEL
 LIDAR SOFTWARE UAVs & IMAGES MONITORING MOBILE MAPPING ACCESSORIES OTHER ABOUT GEXCEL BUSINESS TEAM LOCATIONS Gexcel offices are located in Italy in two Innovation Centers SALES NETWORK Gexcel s worldwide
LIDAR SOFTWARE UAVs & IMAGES MONITORING MOBILE MAPPING ACCESSORIES OTHER ABOUT GEXCEL BUSINESS TEAM LOCATIONS Gexcel offices are located in Italy in two Innovation Centers SALES NETWORK Gexcel s worldwide
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
FARO Laser Scanner Focus 3D X330 Demonstration Day
 FARO Laser Scanner Focus 3D X330 Demonstration Day Thursday 7 th November 2013 Precision Measurement Technology New Version SCENE 5.2 - Overview Support for Focus 3D X 330 SCENE WebShare Cloud Integration
FARO Laser Scanner Focus 3D X330 Demonstration Day Thursday 7 th November 2013 Precision Measurement Technology New Version SCENE 5.2 - Overview Support for Focus 3D X 330 SCENE WebShare Cloud Integration
3D Reconstruction with Tango. Ivan Dryanovski, Google Inc.
 3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System
 Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System Under supervision of: Prof. Dr. -Ing. Klaus-Dieter Kuhnert Dipl.-Inform.
Intelligent Outdoor Navigation of a Mobile Robot Platform Using a Low Cost High Precision RTK-GPS and Obstacle Avoidance System Under supervision of: Prof. Dr. -Ing. Klaus-Dieter Kuhnert Dipl.-Inform.
3D Terrestrial Laser Scanner Innovative Applications for 3D Documentation
 3D Terrestrial Laser Scanner Innovative Applications for 3D Documentation Rodney Chaffee Head of Sales, FARO Asia Pacific 3D Laser Scaning Market 2017 2.3 Billion $ 2012 1.3 Billion $ CAGR : > 12% Source:
3D Terrestrial Laser Scanner Innovative Applications for 3D Documentation Rodney Chaffee Head of Sales, FARO Asia Pacific 3D Laser Scaning Market 2017 2.3 Billion $ 2012 1.3 Billion $ CAGR : > 12% Source:
The Most Comprehensive Solution for Indoor Mapping Applications
 The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
RIEGL VMX-250. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Comparative study on the differences between the mobile mapping backpack systems ROBIN- 3D Laser Mapping, and Pegasus- Leica Geosystems.
 3 th Bachelor Real Estate, Land Surveying Measuring Methods III Comparative study on the differences between the mobile mapping backpack systems ROBIN- 3D Laser Mapping, and Pegasus- Leica Geosystems.
3 th Bachelor Real Estate, Land Surveying Measuring Methods III Comparative study on the differences between the mobile mapping backpack systems ROBIN- 3D Laser Mapping, and Pegasus- Leica Geosystems.
StreetMapper 360 & StreetMapper Portable
 StreetMapper 360 & StreetMapper Portable 11th February 2010 Dr. Chris Cox & Mr. Olaf Gross 3D Laser Mapping LIDAR Specialists StreetMapper Distributor for RIEGL (UK, Ireland, Southern Africa) Terrasolid
StreetMapper 360 & StreetMapper Portable 11th February 2010 Dr. Chris Cox & Mr. Olaf Gross 3D Laser Mapping LIDAR Specialists StreetMapper Distributor for RIEGL (UK, Ireland, Southern Africa) Terrasolid
Artec Leo. A smart professional 3D scanner for a next-generation user experience
 Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design See your
Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design See your
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
Artec Leo. A smart professional 3D scanner for a next-generation user experience
 Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design See your
Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design See your
Trimble VISION Positions from Pictures
 Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL
 JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL") Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL OVERVIEW JRC 3D Reconstructor is the well known multi-platform and multi-resolution software
Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL OVERVIEW JRC 3D Reconstructor is the well known multi-platform and multi-resolution software
3D ponttechnológia használata napjainkban október. 10. Tatabány, Mérnöki továbbképzés Zeke Zsolt Mérnök üzletkötő
 3D ponttechnológia használata napjainkban 2018. október. 10. Tatabány, Mérnöki továbbképzés Zeke Zsolt Mérnök üzletkötő Leica BLK3D NEW based on photogrametry Leica HDS Termékportfólió BLK360 RTC360 P40/50
3D ponttechnológia használata napjainkban 2018. október. 10. Tatabány, Mérnöki továbbképzés Zeke Zsolt Mérnök üzletkötő Leica BLK3D NEW based on photogrametry Leica HDS Termékportfólió BLK360 RTC360 P40/50
Watershed Sciences 4930 & 6920 ADVANCED GIS
 Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Watershed Sciences 4930 & 6920 ADVANCED GIS TERRESTRIAL LASER SCANNING (AKA GROUND BASED LIDAR) Joe Wheaton PURPOSE OF TODAY S DEMONSTRATION Introduce you to TLS Demystify TLS & LiDaR TODAY S PLAN I. What
Servosila Robotic Heads
 Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Introducing a New Class of Survey-Grade Laser Scanning by use of Unmanned Aerial Systems (UAS)
") Introducing a New Class of Survey-Grade Laser Scanning by use of Unmanned Aerial Systems (UAS) Philipp AMON, Ursula RIEGL, Peter RIEGER and Martin PFENNIGBAUER, Austria Key words: UAS, laser scanning,
Introducing a New Class of Survey-Grade Laser Scanning by use of Unmanned Aerial Systems (UAS) Philipp AMON, Ursula RIEGL, Peter RIEGER and Martin PFENNIGBAUER, Austria Key words: UAS, laser scanning,
3D Laser Scanning Technology. Fast, Safe, Accurate. Rugged hardware and powerful software combined with streamlined survey workflow
 3D Laser Scanning Technology Fast, Safe, Accurate Rugged hardware and powerful software combined with streamlined survey workflow Maptek specialises in the research, development and application of 3D laser
3D Laser Scanning Technology Fast, Safe, Accurate Rugged hardware and powerful software combined with streamlined survey workflow Maptek specialises in the research, development and application of 3D laser
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
EMBEDDED VISION AND 3D SENSORS: WHAT IT MEANS TO BE SMART
 EMBEDDED VISION AND 3D SENSORS: WHAT IT MEANS TO BE SMART INTRODUCTION Adding embedded processing to simple sensors can make them smart but that is just the beginning of the story. Fixed Sensor Design
EMBEDDED VISION AND 3D SENSORS: WHAT IT MEANS TO BE SMART INTRODUCTION Adding embedded processing to simple sensors can make them smart but that is just the beginning of the story. Fixed Sensor Design
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
Automate Pulse Set-Up Instructions
 Automate Pulse Set-Up Instructions ABOUT THE AUTOMATE SHADES SKILL The Automate Pulse app allows for control of your motorized window coverings through your smartphone/tablet THE APP ALLOWS FOR: Individual
Automate Pulse Set-Up Instructions ABOUT THE AUTOMATE SHADES SKILL The Automate Pulse app allows for control of your motorized window coverings through your smartphone/tablet THE APP ALLOWS FOR: Individual
UHD 185 FAQs. Optical System
 UHD 185 FAQs System Setup How is a typical setup of the UHD 185? Is a wireless control during flight possible? How do I trigger the image acquisition? What is the power consumption? What are the specs
UHD 185 FAQs System Setup How is a typical setup of the UHD 185? Is a wireless control during flight possible? How do I trigger the image acquisition? What is the power consumption? What are the specs
RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
VZ series Camera Calibration
 VZ series Camera Calibration Calibration Field Setup Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10
VZ series Camera Calibration Calibration Field Setup Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Artec Leo. A smart professional 3D scanner for a next-generation user experience
 Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design See your
Artec Leo A smart professional 3D scanner for a next-generation user experience Industrial design and manufacturing / Healthcare VR / E-commerce / Science and education Forensics / Art and design See your
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold