RIEGL VZ-400i. Digital Information in 3D Innovations and Best Practises. 4th to 5th of November, Prince Philip House, London
|
|
|
- Marshall Henry
- 5 years ago
- Views:
Transcription




1 RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0
2 continuous developments on VZ platform Improvment Camera Mount Compass Integration Integration Additional Sensors Add On Akku Integration External GNSS RIEGL VMZ System Automatic Reflector Search Automatic Backsighting/Foresighting Full Waveform Data Output





3 RIEGL VZ scanner overview VZ 400 VZ 1000 VZ-2000 VZ 4000 VZ 6000 max. range 600m max. range 1400m max. range 2050m max. range 4000m max. range 6000m precision 3mm accuracy 5mm precision 5mm accuracy 8mm precision 5mm accuracy 8mm precision 10mm accuracy 15mm precision 10mm accuracy 15mm Laser Class 1 Laser Class 1 Laser Class 1 Laser Class 1 Laser Class 3B






4 RIEGL VZ 400i module Measurement range up to Highspeed measurement pulse repetition rate Multiple Time Around enabled capabilities

5 RIEGL VZ 400i under the hood LIDAR engine echo digitization online waveform processing
6 RIEGL VZ 400i under the hood LIDAR engine echo digitization online waveform processing data storage, interfacing internal storage, external storage data transfer, reporting add on camera up to 37Mpix GNSS receiver integrated L1 receiver external L1/L2 receiver

7 RIEGL VZ 400i under the hood LIDAR engine echo digitization online waveform processing data storage, interfacing internal storage, external storage data transfer, reporting add on camera up to 37Mpix GNSS receiver integrated L1 receiver external L1/L2 receiver pose sensors tilt sensors, compass gyros, barometric sensor


8 RIEGL VZ 400i under the hood LIDAR engine echo digitization online waveform processing data storage, interfacing internal storage, external storage data transfer, reporting add on camera up to 37Mpix GNSS receiver integrated L1 receiver external L1/L2 receiver pose sensors tilt sensors, compass gyros, barometric sensor post processor real time data post processing e.g. data conversion, registration

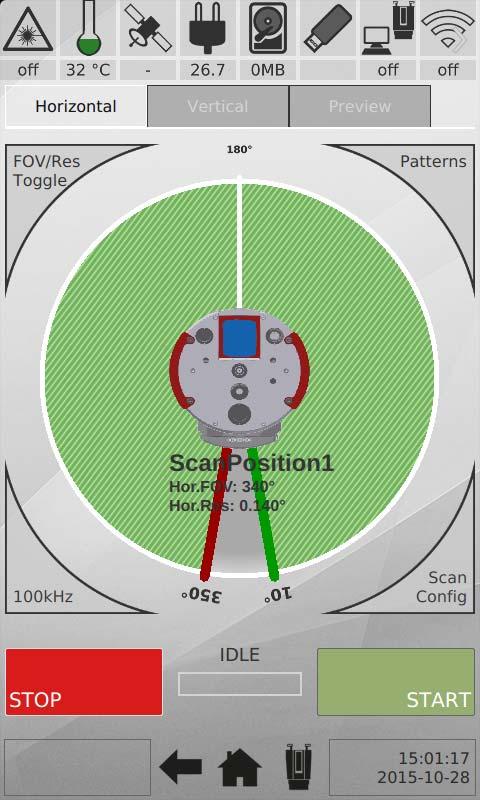

9 User interface 5




10 User interface storage Re-open Project Auto increment New Project Last Scan Position Project Name New Scan Position New Scan Position Scan Position Name Project Wizard New Scan Acquisition New Scan Acquisition Levelling Assistant Roll, pitch, Yaw, Orientation Camera Assistant Exposure Gain Acquire test image Histogram






11 Interfaces, Connectors Connector for external GNSS receiver LTE/4G/3G Nano-SIM card slot Camera interface: USB 3.0, power supply, trigger, GigE Vision Wireless network up to 154Mb/s






12 Interfaces, Connectors USB 3.0 SDXC card slot for up to 512 GB storage media Power supply, 10/100/1000 Mbit/s LAN


13 LIDAR performance faster measurement rate up to 300 khz up to 1200 khz increased measurement range 600 m 800 m at 100 khz higher scan speed 120 LPS 240 LPS and 60 /sec 150 /sec 1.2 MHz 600 khz 100 khz 300 khz 3:00 min 1:30 min 0:45 min scan time for FOV of 100 x 360 with 0.04 resolution 8:52 min
14 Multiple Time Around Speed of light c 0 = m / s 3.3μs 3.3μs 1000m measurements per second

15 Multiple Time Around Speed of light c 0 = m / s 1000m Multiple pulses are sent out before the first return is received
![Multiple Time Around Speed of light c 0 = 299 792 458 m / s P T (t) PRI[k-3] PRI[k-2] PRI[k-1] PRI[k] T T [k-3] T T [k-2] T T](/docs-images/86/94331175/images/16-2.jpg "[k-1] T T [k] T T [k+1] t P E (t) T E [k-3] T E [k-2] T E [k-1] T E [k] t Task: Assign the echoe return to the corresponding")
16 Multiple Time Around Speed of light c 0 = m / s P T (t) PRI[k-3] PRI[k-2] PRI[k-1] PRI[k] T T [k-3] T T [k-2] T T [k-1] T T [k] T T [k+1] t P E (t) T E [k-3] T E [k-2] T E [k-1] T E [k] t Task: Assign the echoe return to the corresponding pulse
17 RIEGL VZ 400i computing power VZ 400i Processing platforms dual-core processor running at 660 MHz Scan Engine DMIPS 3,300 DMIPS 0 10,000 20,000 30,000 40,000 50,000 quad-core up to 2.2 GHz Post Processor DMIPS 30,000 DMIPS 0 10,000 20,000 30,000 40,000 50,000 GPU with 192 cores running at up to 850 MHz Main tasks echo digitization online waveform processing data attributes data stream compression housekeeping and control Main tasks LIDAR engine commanding graphical user interface acquisition & processing of camera images, GNSS data, pose sensor data managing interface executing post-processing tasks
18 VZ 400i LIDAR system software post processor runs libraries and executables RDB SDK in version 2.0, as will be used by RiSCAN PRO and RiPROCESS point cloud database spatially sorted data compression level of detail (LOD) supporting extended attributes Meta data header

19 VZ 400i LIDAR system software post processor runs libraries and executables RiMTA-TLS solving range ambiguities due to high pulse repetition rate
20 VZ 400i LIDAR system software post processor runs libraries and executables RiMTA-TLS solving range ambiguities due to high pulse repetition rate

21 VZ 400i LIDAR system software post processor runs libraries and executables RiMTA-TLS solving range ambiguities due to high pulse repetition rate
 by automatic detected and fine scanned targets by a combination of both methods DirectGeoreference Freestation")
22 VZ 400i LIDAR system software post processor runs libraries and executables Registration module by in built sensors (GNSS, IMU, Compass) by automatic detected and fine scanned targets by a combination of both methods DirectGeoreference Freestation Backsight


23 VZ 400i LIDAR system software post processor runs libraries and executables Adjustment module by automatically detected plane patches
24 VZ 400i LIDAR system software post processor runs libraries and executables GeoSysManager online EPSG database access fully customizable definitions Import/Export of Coordinate Reference System GNSS EPSG National Grid Scanner Projections Ground Control WKT Mapping coordinates ECEF
25 VZ 400i LIDAR system software RDBLibrary RiMTA TLS Registration Module rawdata to 3d pointcloud processing solving range ambiguities combining scandata in one PRCS (Project Coordinate System) Adjustment Module optimization of registration based point cloud features GeoSysManager transformation into any CRS (Coordinate Reference System) further post processing tasks possible!!








26 Cloud Connected VZ 400i Acquire/ Process Process Deliver
27 Online reporting user configures account, address of recipient events when to send an content of report examples of events with every new scan position with closing of project on failure of scan position registration content summary as text (scan position content, number of scans, images, etc) images of previews as attachments kml file as attachment showing scan position in e.g. Google Earth kml file with images of scan data in bird eyes view


28 RIEGL VZ 400i THANK YOU
Geosmart Asia Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency. Thomas Gaisecker. April, 2018
 Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Innovation in 3D. Product Overview
 Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
Innovation in 3D Product Overview TERRESTRIAL LASER SCANNING VQ-1560i MULTIPLE-TIME- AROUND-PROCESSING VZ-400i ECHO DIGITIZATION AIRBORNE LASER SCANNING VUX-1UAV HIGHLY ACCURATE EFFICIENT LIGHTWEIGHT RiCOPTER
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR
 Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Terrasolid European Training Event
 Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
VMX -2HA RIEGL. High Speed, High Performance Dual Scanner Mobile Mapping System. Typical Applications
 RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
RIEGL 420m 2 MHz VMX -2HA optional High-Speed 10 GigE Link for acquisition of 2 million measurements/sec and image data of up to 9 different high-end cameras The is a High Speed, High Performance Dual
NEW RIEGL. Triple Scanner Mobile Mapping System Specifically Designed for Rail Application. Typical Applications
 NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
NEW RIEGL VMX -RAIL 3 MHz pulse repetition rate, and 750 lines per second resulting in up to 7000 pts/m 2 in 3m range at 80 km/h platform speed 420m 3 MHz optional The is a fully integrated Mobile Laser
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ1000-01-000-00 3D Laser Scanner (Part-No. HW-VZ1000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
WELCOME. A High-Tech Company introducing itself. to a short presentation of RIEGL Laser Measurement Systems GmbH
 WELCOME A High-Tech Company introducing itself to a short presentation of RIEGL Laser Measurement Systems RIEGL Laser Measurement Systems GmbH With more than 30 years experience in the research, development
WELCOME A High-Tech Company introducing itself to a short presentation of RIEGL Laser Measurement Systems RIEGL Laser Measurement Systems GmbH With more than 30 years experience in the research, development
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 Part-No. HW-ZXX-06-000-00 High Resolution Digital Camera with accessories (for details see camera configuration) High-Precision
UV-NIR LASER BEAM PROFILER
 CinCam CMOS - Technical Data - CMOS-1201 CMOS-1202 CMOS-1203 CMOS-1204 Standard Series Standard Series Standard Series Standard Series SENSOR DATA Format: 1/2 1/1.8 1/1.8 1/2.5 Active area (without cover
CinCam CMOS - Technical Data - CMOS-1201 CMOS-1202 CMOS-1203 CMOS-1204 Standard Series Standard Series Standard Series Standard Series SENSOR DATA Format: 1/2 1/1.8 1/1.8 1/2.5 Active area (without cover
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z420i
 Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
Holder for GPS antenna, detachable, for Nikon D200 / D90 / D300(s) / D700 and for Canon EOS 20D camera mount Part-No. HW-ZXX-06-000-00 or for Canon EOS 1Ds Mark II camera mount Part-No. HW-ZXX-06-001-00
RIEGL VMX-450. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
Compact Mobile Laser Scanning System RIEGL VMX-450 2 RIEGL VQ-450 scanners smoothly integrated with IMU/GNSS unit very high measurement rate up to 1.1 million meas./sec scanning rate up to 400 lines/sec
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
CinCam CCD - Technical Data -
 - Technical Data - SENSOR DATA CCD-1201 CCD-1301 CCD-2301 CCD-2302 Format: 1/2 1/3 2/3 2/3 Active area: 6.5mm x 4.8mm 4.8mm x 3.6mm 9.0mm x 6.7mm 8.5mm x 7.1mm Number of pixel: 1388 x 1038 (1.4MPixel)
- Technical Data - SENSOR DATA CCD-1201 CCD-1301 CCD-2301 CCD-2302 Format: 1/2 1/3 2/3 2/3 Active area: 6.5mm x 4.8mm 4.8mm x 3.6mm 9.0mm x 6.7mm 8.5mm x 7.1mm Number of pixel: 1388 x 1038 (1.4MPixel)
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
UV-NIR LASER BEAM PROFILER
 - Technical Data - CCD-1201 CCD-2301 CCD-2302 Standard Series Standard Series Standard Series SENSOR DATA Format: 1/2 2/3 2/3 Active area (without cover glass): 6.5mm x 4.8mm 9.0mm x 6.7mm 8.5mm x 7.1mm
- Technical Data - CCD-1201 CCD-2301 CCD-2302 Standard Series Standard Series Standard Series SENSOR DATA Format: 1/2 2/3 2/3 Active area (without cover glass): 6.5mm x 4.8mm 9.0mm x 6.7mm 8.5mm x 7.1mm
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
POLARIS Laser Scanner
 POLARIS Laser Scanner Compact, Powerful, Scanning Technology from Teledyne Optech The Optech Polaris Terrestrial Laser Scanner (TLS) delivers accurate, precise data faster than ever before, bridging the
POLARIS Laser Scanner Compact, Powerful, Scanning Technology from Teledyne Optech The Optech Polaris Terrestrial Laser Scanner (TLS) delivers accurate, precise data faster than ever before, bridging the
RIEGL VMX-250. Mobile Laser Scanning. Compact Mobile Laser Scanning System. visit our website
 Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
Compact Mobile Laser Scanning System RIEGL VMX-250 The RIEGL VMX-250 is an extremely compact and user-friendly Mobile Laser Scanning System. 2 RIEGL VQ-250 scanners smoothly integrated with IMU/GNSS unit
BIM & Digital Transformation Scotland Live 2018 Capturing 3D Reality at the push of a button
 BIM & Digital Transformation Scotland Live 2018 Capturing 3D Reality at the push of a button Gary Kelly Country Manager Scotland Leica Geosystems @LeicaScot Capturing 3D Reality at the push of a button
BIM & Digital Transformation Scotland Live 2018 Capturing 3D Reality at the push of a button Gary Kelly Country Manager Scotland Leica Geosystems @LeicaScot Capturing 3D Reality at the push of a button
LAS extrabytes implementation in RIEGL software WHITEPAPER
 in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
in RIEGL software WHITEPAPER _ Author: RIEGL Laser Measurement Systems GmbH Date: May 25, 2012 Status: Release Pages: 13 All rights are reserved in the event of the grant or the registration of a utility
M100 GigE Series. Multi-Camera Vision Controller. Easy cabling with PoE. Multiple inspections available thanks to 6 GigE Vision ports and 4 USB3 ports
 M100 GigE Series Easy cabling with PoE Multiple inspections available thanks to 6 GigE Vision ports and 4 USB3 ports Maximized acquisition performance through 6 GigE independent channels Common features
M100 GigE Series Easy cabling with PoE Multiple inspections available thanks to 6 GigE Vision ports and 4 USB3 ports Maximized acquisition performance through 6 GigE independent channels Common features
Z series Camera Calibration
 Z series Camera Calibration Calibration Field Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10 feet
Z series Camera Calibration Calibration Field Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10 feet
Hardware 3D Mapping Systems
 Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying. IR laser scanner channel OCTOBER 2015
 RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
RIEGL VQ 880 G Laser Scanner System for Topo Bathymetric Surveying with NEW optional IR laser scanner channel OCTOBER 2015 VQ 880 G Highlights excellently suited for combined hydrographic and topographic
Reality Capture using: RPAS Technologies & Image Laser Scanners
 Reality Capture using: RPAS Technologies & Image Laser Scanners by Johan Erasmus (RPAS Technologies) & Barend Bornman (Image Laser Scanners) from Aciel Geomatics Laser Scanners High-Definition Surveying
Reality Capture using: RPAS Technologies & Image Laser Scanners by Johan Erasmus (RPAS Technologies) & Barend Bornman (Image Laser Scanners) from Aciel Geomatics Laser Scanners High-Definition Surveying
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
IP-S2 HD HD IP-S2. 3D Mobile Mapping System. 3D Mobile Mapping System
 HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
High-performance mean currents and turbulence, wave height and direction
 High-performance mean currents and turbulence, wave height and direction The ADCP is the optimal tool for turbulence measurements. With a maximum sampling frequency of 16 Hz, it gives the scientific community
High-performance mean currents and turbulence, wave height and direction The ADCP is the optimal tool for turbulence measurements. With a maximum sampling frequency of 16 Hz, it gives the scientific community
Leica Geosystems Regional Public Safety Conference. Joshua Rayburn Consolidated Forensic Laboratory, Washington DC Present Date:
 Leica Geosystems Regional Public Safety Conference Joshua Rayburn Consolidated Forensic Laboratory, Washington DC Present Date: 04.15.15 2 What is a Pegasus? Portable survey-grade mobile mapping solution
Leica Geosystems Regional Public Safety Conference Joshua Rayburn Consolidated Forensic Laboratory, Washington DC Present Date: 04.15.15 2 What is a Pegasus? Portable survey-grade mobile mapping solution
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
CMOS USORIA. Features
 CMOS USORIA A CMOS, 2 Megapixel (1600x1200), 1/2 Inch, Color, USB 2, Triggerable, Rugged, Lightweight, Industrial Vision Camera With a C Mount and Tripod Adapter It is Designed for Inspection, Instrumentation,
CMOS USORIA A CMOS, 2 Megapixel (1600x1200), 1/2 Inch, Color, USB 2, Triggerable, Rugged, Lightweight, Industrial Vision Camera With a C Mount and Tripod Adapter It is Designed for Inspection, Instrumentation,
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
FIELD OPERATION CENTER Coastal Hydraulics Lab. Field Data Collection and Analysis Branch Our Team Members
 FIELD OPERATION CENTER Coastal Hydraulics Lab Field Data Collection and Analysis Branch Our Team Members Mobile/Static LIDAR and Photogrammetry Platforms and Equipment Mobile/Static LIDAR and Photogrammetry
FIELD OPERATION CENTER Coastal Hydraulics Lab Field Data Collection and Analysis Branch Our Team Members Mobile/Static LIDAR and Photogrammetry Platforms and Equipment Mobile/Static LIDAR and Photogrammetry
DT MS/s High-Speed, Isolated Simultaneous USB Data Acquisition Module. Overview. Key Features. Bandwidth of the DT9862
 DT9862 10 MS/s High-Speed, Isolated Simultaneous USB Data Acquisition Module Overview The DT9862 is a high-speed, high-performance USB data acquisition module that provide throughput rates up to 10 MS/s
DT9862 10 MS/s High-Speed, Isolated Simultaneous USB Data Acquisition Module Overview The DT9862 is a high-speed, high-performance USB data acquisition module that provide throughput rates up to 10 MS/s
UAS based laser scanning for forest inventory and precision farming
 UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
Data Integration in Building Virtual Models
 Data Integration in Building Virtual Models Erik Singels, Geospatial Information Sciences Program Brent Vollmar, Department of Geosciences Adewale Okunoren, Department of Geosciences Carlos L. V. Aiken,
Data Integration in Building Virtual Models Erik Singels, Geospatial Information Sciences Program Brent Vollmar, Department of Geosciences Adewale Okunoren, Department of Geosciences Carlos L. V. Aiken,
Leica BLK360 Questions & Answers. Vers
 Questions & Answers Vers. 11.01.2017 What is it? 2 What is it? 3 What is it? Calibrated full spherical image, LED flash support 4 What is it? 5 A new, simple way to capture reality Speed On-the-fly image
Questions & Answers Vers. 11.01.2017 What is it? 2 What is it? 3 What is it? Calibrated full spherical image, LED flash support 4 What is it? 5 A new, simple way to capture reality Speed On-the-fly image
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment
 Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
M100 GigE Series. Multi-Camera Vision Controller. Easy cabling with PoE. Multiple inspections available thanks to 6 GigE Vision ports and 4 USB3 ports
 M100 GigE Series Easy cabling with PoE Multiple inspections available thanks to 6 GigE Vision ports and 4 USB3 ports Maximized acquisition performance through 6 GigE independent channels Common features
M100 GigE Series Easy cabling with PoE Multiple inspections available thanks to 6 GigE Vision ports and 4 USB3 ports Maximized acquisition performance through 6 GigE independent channels Common features
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
3 D L A S E R S C A N N I N G S Y S T E M S RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet 2015 Ocular Robotics Ltd All rights reserved RobotEye RE08 3D LIDAR - 3D Laser Scanning System
ALL-IN-ONE DRONE SOLUTION FOR 3D MODELING
 ALL-IN-ONE DRONE SOLUTION FOR 3D MODELING Powered by PHOTO & VIDEO FULL HD 1080P - 14MPX 3-AXIS STABILIZATION AUGMENTED POWER 30MIN FLIGHT TIME 32GB INTERNAL MEMORY INCLUDES 3D MODELING SOFTWARE SAFE VIEW
ALL-IN-ONE DRONE SOLUTION FOR 3D MODELING Powered by PHOTO & VIDEO FULL HD 1080P - 14MPX 3-AXIS STABILIZATION AUGMENTED POWER 30MIN FLIGHT TIME 32GB INTERNAL MEMORY INCLUDES 3D MODELING SOFTWARE SAFE VIEW
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
DCP Pocket for TDRA6000. Gerald Koeck / Commercial Support November 2011
 DCP Pocket for TDRA6000 Gerald Koeck / Commercial Support November 2011 1 DCP Pocket for TDRA6000 Features of the new Getac Pocket PC solution with DCP Pocket: Mobile Metrology software solution DCP Pocket
DCP Pocket for TDRA6000 Gerald Koeck / Commercial Support November 2011 1 DCP Pocket for TDRA6000 Features of the new Getac Pocket PC solution with DCP Pocket: Mobile Metrology software solution DCP Pocket
Amberg ScanControl. Easy pointcloud acquisition. User manual. Amberg Technologies AG Trockenloosstrasse Regensdorf Switzerland
 Amberg ScanControl Easy pointcloud acquisition 15/09/2015 (Application Version 1.0) Art.No. 21605 Amberg Technologies AG Trockenloosstrasse 21 8105 Regensdorf Switzerland Phone: +41 44 870 92 22 Mail:
Amberg ScanControl Easy pointcloud acquisition 15/09/2015 (Application Version 1.0) Art.No. 21605 Amberg Technologies AG Trockenloosstrasse 21 8105 Regensdorf Switzerland Phone: +41 44 870 92 22 Mail:
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
Mobile POS Tablet Barcode Scanner
 DT398C/ DT398B OPERATION GUIDE Mobile POS Tablet Barcode Scanner Installation The Barcode Scanner is preinstalled as an option for the DT398C/ DT398B. Barcode Scanner Trigger Button Peripheral Scanning
DT398C/ DT398B OPERATION GUIDE Mobile POS Tablet Barcode Scanner Installation The Barcode Scanner is preinstalled as an option for the DT398C/ DT398B. Barcode Scanner Trigger Button Peripheral Scanning
CompuScope 1602 product introduction
 CompuScope 1602 product introduction CompuScope 1602 is 16 bit dual channel, 2.5 MS/s waveform digitizer card for the PCI Bus. Recognizing that until very recently, almost all multi-megahertz data acquisition
CompuScope 1602 product introduction CompuScope 1602 is 16 bit dual channel, 2.5 MS/s waveform digitizer card for the PCI Bus. Recognizing that until very recently, almost all multi-megahertz data acquisition
TLS Data Processing and Exploration Manual
 Katherine Shervais (UNAVCO), Marin Clark (University of Michigan) Collecting data in the field is only the first step in the complete TLS workflow. This manual will take you through the skills needed to
Katherine Shervais (UNAVCO), Marin Clark (University of Michigan) Collecting data in the field is only the first step in the complete TLS workflow. This manual will take you through the skills needed to
Advancing AiHD Cloud Solution
 NEW Advancing AiHD Cloud Solution Ai Holdings Corporation (parent company to Graphtec) created the "" cloud system by consolidating resources from group companies to provide advanced IoT platform with
NEW Advancing AiHD Cloud Solution Ai Holdings Corporation (parent company to Graphtec) created the "" cloud system by consolidating resources from group companies to provide advanced IoT platform with
G2-AS100. Presents: A mid-format fully integrated photogrammetric camera
 Presents: G2-AS100 A mid-format fully integrated photogrammetric camera Designed and manufactured by Global Geo Supplies, Inc. Lone Tree, Colorado USA 1 TABLE OF CONTENTS CAMERA SPECIFICATIONS LENSES PERFORMANCE
Presents: G2-AS100 A mid-format fully integrated photogrammetric camera Designed and manufactured by Global Geo Supplies, Inc. Lone Tree, Colorado USA 1 TABLE OF CONTENTS CAMERA SPECIFICATIONS LENSES PERFORMANCE
3D OBJECT MODEL RECONSTRUCTION BASED ON LASER SCANNING POINT CLOUD DATA
 3D OBJECT MODEL RECONSTRUCTION BASED ON LASER SCANNING POINT CLOUD DATA Tien Thanh Nguyen 1, Quang Minh Nguyen 2, Xiu Guo Liu 1, Yao Yevenyo Ziggah 1 1 Faculty of Information Engineering, China University
3D OBJECT MODEL RECONSTRUCTION BASED ON LASER SCANNING POINT CLOUD DATA Tien Thanh Nguyen 1, Quang Minh Nguyen 2, Xiu Guo Liu 1, Yao Yevenyo Ziggah 1 1 Faculty of Information Engineering, China University
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer
 Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
VZ series Camera Calibration
 VZ series Camera Calibration Calibration Field Setup Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10
VZ series Camera Calibration Calibration Field Setup Place 30 5cm flat reflector targets 1 foot apart on three columns. Place 10 targets on each column vertically. The columns should be approximately 10
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Trimble VISION Positions from Pictures
 Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Leica ALS70. Airborne Laser Scanners Performance for diverse Applications
 Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Dimensions. System Information. Memory. Stand mm (19.4 inches) mm (26.1 inches) Depth mm (1.4 inches) 78.2 mm (3.
 mm (26.1 inches) Depth mm (1.4 inches) 78.2 mm (3.") 27 Specifications 2013 Dell Inc. Trademarks used in this text: Dell, the DELL logo, and XPS are trademarks of Dell Inc. Intel is a registered trademark and Core is a trademark of Intel Corporation in the
27 Specifications 2013 Dell Inc. Trademarks used in this text: Dell, the DELL logo, and XPS are trademarks of Dell Inc. Intel is a registered trademark and Core is a trademark of Intel Corporation in the
Terrestrial 3D laser scanning Practical aspects
 Terrestrial 3D laser scanning Practical aspects ISPRS WG VI/5&SC Summer School 2007 by Gregor Bilban 3D laser scanning Benefits Lower data collection costs Reduction or elimination of re-visits More accurate
Terrestrial 3D laser scanning Practical aspects ISPRS WG VI/5&SC Summer School 2007 by Gregor Bilban 3D laser scanning Benefits Lower data collection costs Reduction or elimination of re-visits More accurate
Speed, Accuracy and Performance at an Affordable Price
 Speed, Accuracy and Performance at an Affordable Price 012 2.A ions olut S 3D3 ed. serv s re ht ll rig VERSATILE for Industry Applications The HDI Advance 3D Scanner uses white light technology for capturing
Speed, Accuracy and Performance at an Affordable Price 012 2.A ions olut S 3D3 ed. serv s re ht ll rig VERSATILE for Industry Applications The HDI Advance 3D Scanner uses white light technology for capturing
Integrated Multi-Source LiDAR and Imagery
 Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
3D LASER SCANNING SYSTEMS. RobotEye RE08 3D LIDAR 3D Laser Scanning System. Product Datasheet
 3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
3D LASER SCANNING SYSTEMS RobotEye RE08 3D LIDAR 3D Laser Scanning System Product Datasheet RobotEye RE08 3D LIDAR - 3D Laser Scanning System Ocular Robotics RobotEye RE08 3D LIDAR - 3D Laser Scanning
Workshop. Dr. Denis Wohlfeld Innovation Manager P l a n t S i m u l a t i o n U s e r C o n f e r e n c e
 Workshop 3D Laser Scan PlantSimulation Dr. Denis Wohlfeld Innovation Manager 2 0 1 6 P l a n t S i m u l a t i o n U s e r C o n f e r e n c e GLOBAL FARO SITES W o r l d l e a d e r i n c o m p u t e
Workshop 3D Laser Scan PlantSimulation Dr. Denis Wohlfeld Innovation Manager 2 0 1 6 P l a n t S i m u l a t i o n U s e r C o n f e r e n c e GLOBAL FARO SITES W o r l d l e a d e r i n c o m p u t e
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]
![9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]](/thumbs/86/94257860.jpg "9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]") 9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
Four Mainstream Reality Capture Tools* Optical GNSS (or more commonly GPS) Lidar. Photogrammetry 12/20/2015. Static Mobile Aerial
 Lidar. Photogrammetry 12/20/2015. Static Mobile Aerial") Four Mainstream Reality Capture Tools* Optical GNSS (or more commonly GPS) Lidar Static Mobile Aerial Photogrammetry UAV Collected Ground Collected 1 Optical Consists of three measurement devices H Angle,
Four Mainstream Reality Capture Tools* Optical GNSS (or more commonly GPS) Lidar Static Mobile Aerial Photogrammetry UAV Collected Ground Collected 1 Optical Consists of three measurement devices H Angle,
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
UAV Hyperspectral system for remote sensing application
 UAV Hyperspectral system for remote sensing application The system consists airborne imaging spectrophotometer placed on a frame suitable for use aircraft, a UAV helicopter and all components needed for
UAV Hyperspectral system for remote sensing application The system consists airborne imaging spectrophotometer placed on a frame suitable for use aircraft, a UAV helicopter and all components needed for
RaceCapture/Pro 3. Next generation of data, telemetry, and control. Live-streaming to Podium
 RaceCapture/Pro 3 Next generation of data, telemetry, and control Your time on track matters and you want to maximize every minute and dollar toward tuning the engine, honing your racecraft, or finding
RaceCapture/Pro 3 Next generation of data, telemetry, and control Your time on track matters and you want to maximize every minute and dollar toward tuning the engine, honing your racecraft, or finding
RaceCapture/Apex. Ruggedized, powerful motorsports telemetry
 RaceCapture/Apex Ruggedized, powerful motorsports telemetry RaceCapture/Apex is a powerful motorsports telemetry system designed for harsh environments. Whether you need telemetry for your open-cockpit
RaceCapture/Apex Ruggedized, powerful motorsports telemetry RaceCapture/Apex is a powerful motorsports telemetry system designed for harsh environments. Whether you need telemetry for your open-cockpit
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation
 Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
VISION MX SERIES. Telephone: Visit Our Website: us:
 MX-Series Vision Processors provide the highest performance in image processing with even more flexibility through multi-camera support. Three models allow you to choose the correct level of performance
MX-Series Vision Processors provide the highest performance in image processing with even more flexibility through multi-camera support. Three models allow you to choose the correct level of performance
Machine Vision based Data Acquisition, Processing & Automation for Subsea Inspection & Detection
 Machine Vision based Data Acquisition, Processing & Automation for Subsea Inspection & Detection 1 st Nov 2017 SUT Presentation: The Leading Edge of Value Based Subsea Inspection Adrian Boyle CEO Introduction
Machine Vision based Data Acquisition, Processing & Automation for Subsea Inspection & Detection 1 st Nov 2017 SUT Presentation: The Leading Edge of Value Based Subsea Inspection Adrian Boyle CEO Introduction
S-Vision. The Digital Video Surveillance System of Shuttle for Home and Office Applications
 The Digital Video Surveillance System of Shuttle for Home and Office Applications Product Description The NVS-System is an innovative digital networking video system which belongs to the S-Vision product
The Digital Video Surveillance System of Shuttle for Home and Office Applications Product Description The NVS-System is an innovative digital networking video system which belongs to the S-Vision product
Measuring the potential impact of offshore mining on coastal instability through integrated time-series laser scanning and photography
 Measuring the potential impact of offshore mining on coastal instability through integrated time-series laser scanning and photography by Neil Slatcher, Roberto Vargas, Chris Cox and Liene Starka, 3D Laser
Measuring the potential impact of offshore mining on coastal instability through integrated time-series laser scanning and photography by Neil Slatcher, Roberto Vargas, Chris Cox and Liene Starka, 3D Laser
Technical Specifications for High speed PIV and High speed PIV-PLIF system
 Technical Specifications for High speed PIV and High speed PIV-PLIF system MODULE A. HIGH SPEED PIV (3-C) A1. Double Cavity High Speed Laser (up to 10 khz): The vendor should provide Dual Head (DH) laser
Technical Specifications for High speed PIV and High speed PIV-PLIF system MODULE A. HIGH SPEED PIV (3-C) A1. Double Cavity High Speed Laser (up to 10 khz): The vendor should provide Dual Head (DH) laser
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Laser scanners with echo digitization for full waveform analysis
 Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
GigE Vision Cameras. Key Features. Dimension (Unit : mm) Pin map (H/W Rev 2.0 이상 ) LED Indicator. back Pannel. Download (File name)
 Pin map (H/W Rev 2.0 이상 ) LED Indicator. back Pannel. Download (File name)") GigE Vision Cameras Key Features (Unit : mm) Mini-size CCD / CMOS GigE camera Camera standard - GenICam, GigE Vision Trigger input range : +3.3V~24V(Photo coupler) PoE 지원 (2Tap 모델제외 ) Pin map (H/W Rev
GigE Vision Cameras Key Features (Unit : mm) Mini-size CCD / CMOS GigE camera Camera standard - GenICam, GigE Vision Trigger input range : +3.3V~24V(Photo coupler) PoE 지원 (2Tap 모델제외 ) Pin map (H/W Rev
From Eye to Insight. Leica DMC2900. Digital microscope camera for easy, efficient documentation and presentation in industry and research
 From Eye to Insight Leica DMC2900 Digital microscope camera for easy, efficient documentation and presentation in industry and research 3 High Speed Imaging Leica DMC2900 with USB 3.0 interface for highest
From Eye to Insight Leica DMC2900 Digital microscope camera for easy, efficient documentation and presentation in industry and research 3 High Speed Imaging Leica DMC2900 with USB 3.0 interface for highest
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
HH Channel Data Logging Headstage Manual. Version 6
 HH128 128-Channel Data Logging Headstage Manual Version 6 Table of Contents 128-Channel Data Logging Headstage (HH128)... 3 Introduction... 3 Headstage Connection to Electrodes... 5 Configuration... 7
HH128 128-Channel Data Logging Headstage Manual Version 6 Table of Contents 128-Channel Data Logging Headstage (HH128)... 3 Introduction... 3 Headstage Connection to Electrodes... 5 Configuration... 7