Processing (Object Detection)
|
|
|
- Jewel Warner
- 5 years ago
- Views:
Transcription
 András")

1 Thermal Video Processing (Object Detection) András Hajdu University of Debrecen, Hungary Summer School on Image Processing







2 Tools for Rescue Operation Management Today 2





3 Tools for Rescue Operation Management SHARE 3
4 SHARE Overview: MAP3D 4

5 SHARE Overview: PTS Video 5

6 SHARE Overview: Interactive Resource Management 6
7 SHARE Overview: Thermal Video Processing 7
8 SHARE architecture 8
9 SHARE architecture Thermal image and video processing Multimodality 9




10 Objectives To provide tools for image and video analysis for assisting a fire-brigade or another rescue team during and after the rescue operation. Integration of state-of-the-art techniques for analyzing images/videos acquired using a thermal camera in a fire/smoke environment. 10

11 Normal vs. thermal view: : An example 11
12 General aims Fire focus Fire occurrences according to hotspot detection to localize the fire, estimate its spreading and determine/estimate its change in time. Person detection Human occurrences in thermal videos to localize human silhouettes to derive rescue and positioning information. Person tracking Human movement analysis in the fire videos according to the trajectory analysis of them. E.g. slower/faster movements, directions. 12
13 End-user requirements Colorization The thermal camera view is generally B&W. The grey tones make it difficult to get a quick overview of thermal characteristics of different objects. Interactive object detection and recognition The recognition of objects is difficult. The user has to click on any area and the recognition module should mark the object. A further requirement is identification i.e. as a person. 13
14 End-user requirements Tactical effectiveness A very important function is the time control of tactical effectiveness. This function is needed to see the thermal condition of an object within different periods (e.g. 10 seconds steps). The thermal status of the marked object is visualized by colored faces. This helps the officer in charge to verify the effectiveness of his tactic, and to correct the methods very fast. 14
15 Video processing module: Sample client application XML Schema to define the control message interface A test version of the service application Integration of the thermal video processing component Ontology entry for new video Ontology Get data from file system (ftp) Archive / FTP File System Main SHARE Client MAP DMF VIDEO TC RET. Inserting metadata Put data into file system 15 Control Traffic: Video file name, processing parameters Thermal Video Processing
16 Integration of the thermal video processing component Defining GUI requirements for the SHARE client Creating a service module with supporting video processing tasks for the second prototype Creating a command message interface Releasing a sample client Adding XML parsing functionalities to interpret the control message and prepare Java source for ODS 16
:")
17 Requirements for the client GUI SHARE thermal video processing tools (1 st prototype GUI): 17
18 Requirements for the client GUI Selection of regions of interest (1 st prototype GUI): Bounding box Snake 18
19 Definition of a control message interface Information sent from the client to the service: Data server and directory information for the input video (video output is generated here, as well), Name of the file to be processed, Processing tasks together with their ROIs and scope (start frame/end frame information), The control message is defined in terms of an XML Schema, and thus the message is sent as an XML file (IP package). 19
20 Control message interface, root class 20

21 Control message interface, ROI class 21
22 Video processing tasks 22 Content description of thermal videos Fire detection with Fourier analysis Supervised object extraction by snakes Tracing quadtrees for better concavity performance Content adaptive heterogeneous snakes Automatic object detection and recognition Creating human pose database Hierarchical clustering for template databases Textual description of database for faster matching Divide and conquer strategy for affine distortions Object simplification for faster matching
23 Content description of thermal videos 23

24 Content description of thermal videos 24

25 Content description of thermal videos 25

26 Content description of thermal videos 26
27 Content description of thermal videos 27
28 Querying based on the Schema Questions on fire: Is there any fire in the XXX scenario? Is there any fire in the XXX scene? Is there any fire in the XXX scene having YYY status? Where is the fire in the XXX scene at the YYY time? Where is the fire in the XXX scene having YYY status? What is the status of the fire in the XXX scene? 28 Questions on human: Are there any humans in the XXX scenario? Are there any humans in the XXX scene? Are there any humans in the XXX scene having YYY status? Where are humans in the XXX scene at the YYY time? Are there any humans in the XXX scene having YYY status? Where are humans in the XXX scene having YYY status? What is the status of humans in the XXX scene? Are there any humans in the XXX scene having YYY activity? Where are humans in the XXX scene having YYY activity? What is the activity of humans in the XXX scene?
29 Querying based on the Schema 29 Instead of using ontology to have the answers we can directly insert evaluation rules (schematrons) into the XML Schema. For example: <xs:appinfo> <sch:pattern name="health problem"> <sch:rule context="lesions"> <sch:report test="((lesion1/detectable) or (lesion2/detectable)) and (lesion3/detectable)"> Given disease is present. </sch:report> </sch:rule> </sch:pattern> </xs:appinfo>

30 Fire detection with Fourier analysis Fire has a special behavior in the frequency domain, so temporal Fourier analysis can be executed to check it, as fire usually has Hz flickering. Artificial fire: 30 F(u) is the average temporal Fourier transform for the changing points.

31 Fire detection with Fourier analysis Natural fire: 31

32 Fire detection with Fourier analysis Non-fire videos does not contain strong peaks in the investigated frequency domain 32


33 Supervised object extraction by snakes GVF snakes are used to extract objects starting from some user defined initial points Insufficient number of iterations can miss concavities Improvement of concavity performance and reduction of iteration steps are useful 33
34 Supervised object extraction by snakes Snake (active contour) model: Energy functional to minimize: Internal snake forces: External force field (GVF): which minimizes: 34

35 Divergence of GVF field For a vector field: Its divergence is defined as: High divergence: Low divergence: Thresholding to decide: 35
36 Improving GVF snake Triangle step We detect bad snake segments based on divergence, estimate snake directions and select a new snake point inside the concavity 36

 37")
37 Supervised object extraction by snakes Tracing quadtrees for better concavity performance We cover the expected object boundary with a grid with larger scale (quadtree decomposition) 37


38 Supervised object extraction by snakes Tracing quadtrees for better concavity performance A boundary tracer is generalized for the thick arc representation, followed by pixelwise iterations 38
39 Supervised object extraction by snakes Content adaptive heterogeneous snakes We can make faster the snake iteration within homogeneous subregions (regions can be defined e.g. by quadtrees) 39
 40")
40 Supervised object extraction by snakes Content adaptive heterogeneous snakes The snake captures the rough boundary in a few iteration steps on the larger grid (e.g. four steps is needed for U-shape) 40
41 Software module 2nd prototype Tasks in the 2 nd prototype Colorization Hotspot detection Fire detection Boundary detection Boundary tracking Boundary object recognition Automatic object detection 41

42 Software module 2nd prototype Colorization tool 42

43 Software module 2 nd prototype Hotspot detection tool 43
44 Software module 2nd prototype Fire detection tool 44

45 Software module 2nd prototype Boundary detection tool 45

46 Software module 2nd prototype Boundary object recognition tool 46

47 Software module 2nd prototype Boundary tracking tool 47

48 Software module 2nd prototype Automatic object detection 48
49 Object detection and recognition Creating human pose database For detection, based on whole object (human) silhouettes a database is created with different activities and views Activities: Views: Running Walking Falling/lying Sitting (testing reasons) Punching(testing reasons) Front Side Top 49

50 Object detection and recognition Creating human pose database Realistic 3D modeling software was used 50
51 Object detection and recognition Creating human pose database Walking Running Falling/lying Punching (demo) 51

52 Object detection and recognition Creating human pose database Since chamfer matching is used to locate database templates boundary tracing is applied to extract database elements 52
53 Object detection and recognition Hierarchical clustering for template databases Templates are organized into hierarchy for faster matching 53

54 Object detection and recognition 54
55 Object detection and recognition Textual description of database for faster matching Database is stored as an XML file containing silhouette vectors 55
 parameter space")
56 Object detection and recognition Divide and conquer strategy for affine distortions The templates may occur in a geometrically distorted way Usually, affine transformations are sufficient to be considered A divide and conquer strategy is used to restrict the search of the affine (6D) parameter space 56


57 Object detection and recognition Object simplification for faster matching For further speed up a point reduction method was developed which preserves the most optimal subset for chamfer matching It can be applied to any sets in arbitrary dimension. Contours: 57
58 Centroidal Voronoi Tessellation framework 58

59 Centroidal Voronoi Tessellation framework 59

60 Centroidal Voronoi Tessellation framework 60
 are also possible.")
61 Centroidal Voronoi Tessellation framework 61 Other algorithms (e.g. random sampling) are also possible.
62 Input Subsampling approach CVT implemantation (McQueen 1967) Original set Number of generators Density function Output CVT generators Properties Many samples might be necessary Start Pick K random points from the set Pick q random points from the set Group the q points into K classes by some metric Set each generator to the average of its group Convergence? N 62 Y Finish
63 Input Subsampling approach CVT implemantation (Lloyd 1982) Original set Initial generators Density function Output CVT generators Properties One has to compute the Voronoi regions Start Construct the Voronoi regions for the generators Set the generators to match the region centroids Convergence? N 63 Y Finish

: 64")
64 Subsampling approach Uniform subsampling We considered constant density function (uniform subsampling), and implemented the Llyod algorithm. A 2D example (starting from random points): 64 Original image Subsampling

65 Object detection and recognition 65

66 Object detection and recognition Object simplification for faster matching and regions: 66

67 Object detection and recognition Object simplification for faster matching Simplification can be done with weighting the set differently 67



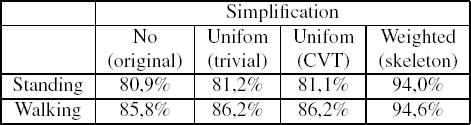
68 Object detection and recognition Simplification using a skeleton-based weight function 68
69 Object detection and recognition Simplification using a skeleton-based weight function 69 WALK RUN LIE1 LIE2
70 Object detection and recognition More focused simplification leads to better matching performance WALK RUN 70
71 Object detection and recognition Simplification using a skeleton-based weight function Different font alphabets can be matched better using this subsampling Times New Roman Arial MS Comic Sans 71
72 Object detection and recognition More focused simplification leads to better matching performance TNR/AR TNR/COMIC 72 AR/COMIC
73 Registration of objects To investigate the impact of an object simplification (subsampling) approach in registration using the Iterative Closest Point (ICP) algorithm Fields of application: Body posture estimation Registering 3D human models Clinical registration Registering 3D medical data 73

74 ICP registration The registration task is to find the geometric transformation parameters (rotation and translation) between two objects represented by point clouds. The paired point-based ICP algorithm determines the geometric parameters through an iterative process. Object 1 Object 2 Transformation parameters? 74
75 Benefit and questions 75 Benefit of subsampling: Since the ICP algorithm considers matching point pairs the computational time drops with using less points. Arising questions: Is the subsampled object capable to find the geometric transformation (does it substitute the original object)? What level of subsampling leads to poor performance? Does subsampling take less time than registration (is it possible to perform subsampling online)? Offline approach Only one of the objects are subsampled (the one taken earlier). Online approach Both of the objects are subsampled.

 76 Original set Subsampled at 5%")
76 Subsampling levels The following 20 subsampling levels were considered: 100% 50% 95% 45% 90% 40% 85% 35% 80% 30% 75% 25% 70% 20% 65% 15% 60% 10% 55% 5% (% of points retained) 76 Original set Subsampled at 5% level

: Simulations applied for 3D")
77 Experimental results Test bed Both simulated an real data were considered. Simulations applied for 3D medical data (hip): Simulations applied for 3D human: 77
78 Experimental results Error measurement In the simulated cases we know the actual transformation parameters: Rotation: Translation: If the transformation parameters found by the ICP algorithm are: Rotation: Translation: Then the error terms are defined as: Rotation: Translation: 78
79 Experimental results SIM1 (geometric degradation for hip) Error of rotation Error of translation 79 ICP accurately found the true parameters down to some subsampling level. Since the geometric degradation was minor, even the 5% level performed quite well.
80 Experimental results SIM2 (geometric degradation for hip) Error of rotation Error of translation 80 For the larger geometric distortion ICP was less successful. Even a simpler version can perform better than the original one.
81 Experimental results SIM3 (geometric degradation for hip) Error of rotation Error of translation 81 For the even larger geometric distortion ICP was even less successful. The subsampled variants behaved similarly to the original one.
82 Experimental results SIM4 (geometric degradation for human) Error of rotation Error of translation 82 Similar results as for the medical data: For the minor transformation, the subsampled versions behaved well. It is possible that a subsampled version behaves better than the original one.
83 Experimental results SIM5 (geometric degradation for human) Error of rotation Error of translation 83 Similar results as for the medical data: More severe geometric transformation results in worse registration performance. The subsampled versions substituted the original one well.
84 Experimental results REAL (geometric degradation for hip) 84 Error of rotation Error of translation In the real test the two sets were captured by CT scans at different times. The transformation parameters found for the original version were considered as having zero error. Down to a level, subsampling performed well.
85 Experimental results Computational times for subsampling Implementations of the subsampling method: Single core: single core CPU environment, Dual core: dual core CPU environment, SSE3: dual core CPU environment using SSE3 instructions. (Intel Core 2 Duo 2.00GHz (T7200), 1.5 GB RAM) Computational times (object of voxels): 85
86 Experimental results Computational times for ICP Implementations of the ICP: The Insight Toolkit (ITK) library was utilized (Levenberg-Marquardt optimizer of the VNL class library), The maximal number of iterations were fixed to be 15, Single core: single core CPU environment, (Intel Core 2 Duo 2.00GHz (T7200), 1.5 GB RAM) Computational times (object of voxels): 86
87 Experimental results Comparing computational times The single core implementation of subsampling was 35 times faster than ICP. The SSE3 implementation of subsampling was 160 times faster than ICP. Thus, the subsampling of the model captured later (online approach) looks to be valid. 87
88 Analysing thermal photographs Thermal cameras are considered in more fields, like: Medical applications, Architecture, (Millitary applications,) (Mechanical/electrical engineering,) (Biometrics,) (Dangerous materials,) 88
89 Analysing thermal photographs 89 Medical thermal cameras: are calibrated for the domain [30ºC--40ºC], have (state-of-the-art) thermal resolution of 0.001ºC, have moderate resolution (384x288). Usual tasks: detecting breast cancer, face recognition (blood vessels), monitoring of disease processes, evaluation of complex regional pain syndrome, storage and retrieval of medical thermograms, applications in dentistry, applications in surgery, monitoring during exercise, fever monitoring (e.g. against bird flue),
90 Approaches for thermal analysis Statistical: Histogram based first order statistics: mean, variance, skewness, kurtosis, energy, entropy, Second order statistics defined on co-occurrence matrix (joint probability of two pixels): energy, variance, difference variance, correlation, inverse difference, entropy, Classification: ANN, knn, PCA, LDA, Anything else (snakes, edge detaction, masked filters, ) 90
91 Thank you! Thank you for your attention. 91
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
3D Shape Representation and Analysis of the Human Body and Ontology for Anthropometric Landmarks
 3D Shape Representation and Analysis of the Human Body and Ontology for Anthropometric Landmarks Afzal Godil National Institute of Standards and Technology, USA WEAR conference, Banff, Canada 2007 Introduction
3D Shape Representation and Analysis of the Human Body and Ontology for Anthropometric Landmarks Afzal Godil National Institute of Standards and Technology, USA WEAR conference, Banff, Canada 2007 Introduction
Reconstruction of Images Distorted by Water Waves
 Reconstruction of Images Distorted by Water Waves Arturo Donate and Eraldo Ribeiro Computer Vision Group Outline of the talk Introduction Analysis Background Method Experiments Conclusions Future Work
Reconstruction of Images Distorted by Water Waves Arturo Donate and Eraldo Ribeiro Computer Vision Group Outline of the talk Introduction Analysis Background Method Experiments Conclusions Future Work
Carmen Alonso Montes 23rd-27th November 2015
 Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques
 Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
Analysis of Functional MRI Timeseries Data Using Signal Processing Techniques Sea Chen Department of Biomedical Engineering Advisors: Dr. Charles A. Bouman and Dr. Mark J. Lowe S. Chen Final Exam October
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Improving the detection of excessive activation of ciliaris muscle by clustering thermal images
 11 th International Conference on Quantitative InfraRed Thermography Improving the detection of excessive activation of ciliaris muscle by clustering thermal images *University of Debrecen, Faculty of
11 th International Conference on Quantitative InfraRed Thermography Improving the detection of excessive activation of ciliaris muscle by clustering thermal images *University of Debrecen, Faculty of
On Skeletons Attached to Grey Scale Images. Institute for Studies in Theoretical Physics and Mathematics Tehran, Iran ABSTRACT
 On Skeletons Attached to Grey Scale Images M. Karimi Behbahani, Arash Rafiey, 2 Mehrdad Shahshahani 3 Institute for Studies in Theoretical Physics and Mathematics Tehran, Iran ABSTRACT In [2], [3] and
On Skeletons Attached to Grey Scale Images M. Karimi Behbahani, Arash Rafiey, 2 Mehrdad Shahshahani 3 Institute for Studies in Theoretical Physics and Mathematics Tehran, Iran ABSTRACT In [2], [3] and
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
CHAPTER-4 LOCALIZATION AND CONTOUR DETECTION OF OPTIC DISK
 CHAPTER-4 LOCALIZATION AND CONTOUR DETECTION OF OPTIC DISK Ocular fundus images can provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular degeneration
CHAPTER-4 LOCALIZATION AND CONTOUR DETECTION OF OPTIC DISK Ocular fundus images can provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular degeneration
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Shape representation by skeletonization. Shape. Shape. modular machine vision system. Feature extraction shape representation. Shape representation
 Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Content-Based Image Retrieval. Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition
 Content-Based Image Retrieval Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR) Searching a large database for
Content-Based Image Retrieval Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR) Searching a large database for
Skeletonization and its applications. Dept. Image Processing & Computer Graphics University of Szeged, Hungary
 Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications Syllabus
Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications Syllabus
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Foundations of Machine Learning CentraleSupélec Fall Clustering Chloé-Agathe Azencot
 Foundations of Machine Learning CentraleSupélec Fall 2017 12. Clustering Chloé-Agathe Azencot Centre for Computational Biology, Mines ParisTech chloe-agathe.azencott@mines-paristech.fr Learning objectives
Foundations of Machine Learning CentraleSupélec Fall 2017 12. Clustering Chloé-Agathe Azencot Centre for Computational Biology, Mines ParisTech chloe-agathe.azencott@mines-paristech.fr Learning objectives
CV: Matching in 2D. Matching 2D images to 2D images; Matching 2D images to 2D maps or 2D models; Matching 2D maps to 2D maps MSU CSE 803
 CV: Matching in 2D Matching 2D images to 2D images; Matching 2D images to 2D maps or 2D models; Matching 2D maps to 2D maps 2D Matching n n Problem 1) Need to match images to maps or models 2) need to
CV: Matching in 2D Matching 2D images to 2D images; Matching 2D images to 2D maps or 2D models; Matching 2D maps to 2D maps 2D Matching n n Problem 1) Need to match images to maps or models 2) need to
CPSC 695. Geometric Algorithms in Biometrics. Dr. Marina L. Gavrilova
 CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
Medical Image Registration by Maximization of Mutual Information
 Medical Image Registration by Maximization of Mutual Information EE 591 Introduction to Information Theory Instructor Dr. Donald Adjeroh Submitted by Senthil.P.Ramamurthy Damodaraswamy, Umamaheswari Introduction
Medical Image Registration by Maximization of Mutual Information EE 591 Introduction to Information Theory Instructor Dr. Donald Adjeroh Submitted by Senthil.P.Ramamurthy Damodaraswamy, Umamaheswari Introduction
Spatio-Temporal Registration of Biomedical Images by Computational Methods
 Spatio-Temporal Registration of Biomedical Images by Computational Methods Francisco P. M. Oliveira, João Manuel R. S. Tavares tavares@fe.up.pt, www.fe.up.pt/~tavares Outline 1. Introduction 2. Spatial
Spatio-Temporal Registration of Biomedical Images by Computational Methods Francisco P. M. Oliveira, João Manuel R. S. Tavares tavares@fe.up.pt, www.fe.up.pt/~tavares Outline 1. Introduction 2. Spatial
Image Segmentation. Shengnan Wang
 Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Modeling and preoperative planning for kidney surgery
 Modeling and preoperative planning for kidney surgery Refael Vivanti Computer Aided Surgery and Medical Image Processing Lab Hebrew University of Jerusalem, Israel Advisor: Prof. Leo Joskowicz Clinical
Modeling and preoperative planning for kidney surgery Refael Vivanti Computer Aided Surgery and Medical Image Processing Lab Hebrew University of Jerusalem, Israel Advisor: Prof. Leo Joskowicz Clinical
Surgery Simulation and Planning
 Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich,
Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich,
Wavelet Applications. Texture analysis&synthesis. Gloria Menegaz 1
 Wavelet Applications Texture analysis&synthesis Gloria Menegaz 1 Wavelet based IP Compression and Coding The good approximation properties of wavelets allow to represent reasonably smooth signals with
Wavelet Applications Texture analysis&synthesis Gloria Menegaz 1 Wavelet based IP Compression and Coding The good approximation properties of wavelets allow to represent reasonably smooth signals with
Network Traffic Measurements and Analysis
 DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
Content-Based Image Retrieval Readings: Chapter 8:
 Content-Based Image Retrieval Readings: Chapter 8: 8.1-8.4 Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR)
Content-Based Image Retrieval Readings: Chapter 8: 8.1-8.4 Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR)
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Automatic Lung Surface Registration Using Selective Distance Measure in Temporal CT Scans
 Automatic Lung Surface Registration Using Selective Distance Measure in Temporal CT Scans Helen Hong 1, Jeongjin Lee 2, Kyung Won Lee 3, and Yeong Gil Shin 2 1 School of Electrical Engineering and Computer
Automatic Lung Surface Registration Using Selective Distance Measure in Temporal CT Scans Helen Hong 1, Jeongjin Lee 2, Kyung Won Lee 3, and Yeong Gil Shin 2 1 School of Electrical Engineering and Computer
An Interactive Technique for Robot Control by Using Image Processing Method
 An Interactive Technique for Robot Control by Using Image Processing Method Mr. Raskar D. S 1., Prof. Mrs. Belagali P. P 2 1, E&TC Dept. Dr. JJMCOE., Jaysingpur. Maharashtra., India. 2 Associate Prof.
An Interactive Technique for Robot Control by Using Image Processing Method Mr. Raskar D. S 1., Prof. Mrs. Belagali P. P 2 1, E&TC Dept. Dr. JJMCOE., Jaysingpur. Maharashtra., India. 2 Associate Prof.
Case-Based Reasoning. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. Parametric / Non-parametric.
 CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008
 CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley 1 1 Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley 1 1 Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Practical Product Importance Sampling for Direct Illumination
 Eurographics 2008 Practical Product Importance Sampling for Direct Illumination Petrik Clarberg Tomas Akenine-Möller Lund University Sweden This work was presented by Petrik Clarberg at Eurographics 2008
Eurographics 2008 Practical Product Importance Sampling for Direct Illumination Petrik Clarberg Tomas Akenine-Möller Lund University Sweden This work was presented by Petrik Clarberg at Eurographics 2008
Content-Based Image Retrieval Readings: Chapter 8:
 Content-Based Image Retrieval Readings: Chapter 8: 8.1-8.4 Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR)
Content-Based Image Retrieval Readings: Chapter 8: 8.1-8.4 Queries Commercial Systems Retrieval Features Indexing in the FIDS System Lead-in to Object Recognition 1 Content-based Image Retrieval (CBIR)
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Skeletonization and its applications. Skeletonization
 Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications 1 Different
Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications 1 Different
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Mobility Data Management & Exploration
 Mobility Data Management & Exploration Ch. 07. Mobility Data Mining and Knowledge Discovery Nikos Pelekis & Yannis Theodoridis InfoLab University of Piraeus Greece infolab.cs.unipi.gr v.2014.05 Chapter
Mobility Data Management & Exploration Ch. 07. Mobility Data Mining and Knowledge Discovery Nikos Pelekis & Yannis Theodoridis InfoLab University of Piraeus Greece infolab.cs.unipi.gr v.2014.05 Chapter
Thermographic Image Analysis Method in Detection of Canine Bone Cancer (Osteosarcoma)
") 2012 5th International Congress on Image and Signal Processing (CISP 2012) Thermographic Image Analysis Method in Detection of Canine Bone Cancer (Osteosarcoma) Maryamsadat Amini, Peng Liu and Scott E
2012 5th International Congress on Image and Signal Processing (CISP 2012) Thermographic Image Analysis Method in Detection of Canine Bone Cancer (Osteosarcoma) Maryamsadat Amini, Peng Liu and Scott E
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Single Particle Reconstruction Techniques
 T H E U N I V E R S I T Y of T E X A S S C H O O L O F H E A L T H I N F O R M A T I O N S C I E N C E S A T H O U S T O N Single Particle Reconstruction Techniques For students of HI 6001-125 Computational
T H E U N I V E R S I T Y of T E X A S S C H O O L O F H E A L T H I N F O R M A T I O N S C I E N C E S A T H O U S T O N Single Particle Reconstruction Techniques For students of HI 6001-125 Computational
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Basics of treatment planning II
 Basics of treatment planning II Sastry Vedam PhD DABR Introduction to Medical Physics III: Therapy Spring 2015 Dose calculation algorithms! Correction based! Model based 1 Dose calculation algorithms!
Basics of treatment planning II Sastry Vedam PhD DABR Introduction to Medical Physics III: Therapy Spring 2015 Dose calculation algorithms! Correction based! Model based 1 Dose calculation algorithms!
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION
 60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
Facial Expression Recognition Using Non-negative Matrix Factorization
 Facial Expression Recognition Using Non-negative Matrix Factorization Symeon Nikitidis, Anastasios Tefas and Ioannis Pitas Artificial Intelligence & Information Analysis Lab Department of Informatics Aristotle,
Facial Expression Recognition Using Non-negative Matrix Factorization Symeon Nikitidis, Anastasios Tefas and Ioannis Pitas Artificial Intelligence & Information Analysis Lab Department of Informatics Aristotle,
Classification. Vladimir Curic. Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University
 Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Registration D.A. Forsyth, UIUC
 Registration D.A. Forsyth, UIUC Registration Place a geometric model in correspondence with an image could be 2D or 3D model up to some transformations possibly up to deformation Applications very important
Registration D.A. Forsyth, UIUC Registration Place a geometric model in correspondence with an image could be 2D or 3D model up to some transformations possibly up to deformation Applications very important
MSA220 - Statistical Learning for Big Data
 MSA220 - Statistical Learning for Big Data Lecture 13 Rebecka Jörnsten Mathematical Sciences University of Gothenburg and Chalmers University of Technology Clustering Explorative analysis - finding groups
MSA220 - Statistical Learning for Big Data Lecture 13 Rebecka Jörnsten Mathematical Sciences University of Gothenburg and Chalmers University of Technology Clustering Explorative analysis - finding groups
A Content Based Image Retrieval System Based on Color Features
 A Content Based Image Retrieval System Based on Features Irena Valova, University of Rousse Angel Kanchev, Department of Computer Systems and Technologies, Rousse, Bulgaria, Irena@ecs.ru.acad.bg Boris
A Content Based Image Retrieval System Based on Features Irena Valova, University of Rousse Angel Kanchev, Department of Computer Systems and Technologies, Rousse, Bulgaria, Irena@ecs.ru.acad.bg Boris
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
PATTERN CLASSIFICATION AND SCENE ANALYSIS
 PATTERN CLASSIFICATION AND SCENE ANALYSIS RICHARD O. DUDA PETER E. HART Stanford Research Institute, Menlo Park, California A WILEY-INTERSCIENCE PUBLICATION JOHN WILEY & SONS New York Chichester Brisbane
PATTERN CLASSIFICATION AND SCENE ANALYSIS RICHARD O. DUDA PETER E. HART Stanford Research Institute, Menlo Park, California A WILEY-INTERSCIENCE PUBLICATION JOHN WILEY & SONS New York Chichester Brisbane
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Discrete geometry. Lecture 2. Alexander & Michael Bronstein tosca.cs.technion.ac.il/book
 Discrete geometry Lecture 2 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 The world is continuous, but the mind is discrete
Discrete geometry Lecture 2 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 The world is continuous, but the mind is discrete
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Image Segmentation. Srikumar Ramalingam School of Computing University of Utah. Slides borrowed from Ross Whitaker
 Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Image Segmentation. Ross Whitaker SCI Institute, School of Computing University of Utah
 Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
OCR and OCV. Tom Brennan Artemis Vision Artemis Vision 781 Vallejo St Denver, CO (303)
") OCR and OCV Tom Brennan Artemis Vision Artemis Vision 781 Vallejo St Denver, CO 80204 (303)832-1111 tbrennan@artemisvision.com www.artemisvision.com About Us Machine Vision Integrator Turnkey Systems OEM
OCR and OCV Tom Brennan Artemis Vision Artemis Vision 781 Vallejo St Denver, CO 80204 (303)832-1111 tbrennan@artemisvision.com www.artemisvision.com About Us Machine Vision Integrator Turnkey Systems OEM
CHAPTER 4 SEMANTIC REGION-BASED IMAGE RETRIEVAL (SRBIR)
") 63 CHAPTER 4 SEMANTIC REGION-BASED IMAGE RETRIEVAL (SRBIR) 4.1 INTRODUCTION The Semantic Region Based Image Retrieval (SRBIR) system automatically segments the dominant foreground region and retrieves
63 CHAPTER 4 SEMANTIC REGION-BASED IMAGE RETRIEVAL (SRBIR) 4.1 INTRODUCTION The Semantic Region Based Image Retrieval (SRBIR) system automatically segments the dominant foreground region and retrieves
Finger Vein Biometric Approach for Personal Identification Using IRT Feature and Gabor Filter Implementation
 Finger Vein Biometric Approach for Personal Identification Using IRT Feature and Gabor Filter Implementation Sowmya. A (Digital Electronics (MTech), BITM Ballari), Shiva kumar k.s (Associate Professor,
Finger Vein Biometric Approach for Personal Identification Using IRT Feature and Gabor Filter Implementation Sowmya. A (Digital Electronics (MTech), BITM Ballari), Shiva kumar k.s (Associate Professor,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I)
") Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
CS664 Lecture #16: Image registration, robust statistics, motion
 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
Chapter DM:II. II. Cluster Analysis
 Chapter DM:II II. Cluster Analysis Cluster Analysis Basics Hierarchical Cluster Analysis Iterative Cluster Analysis Density-Based Cluster Analysis Cluster Evaluation Constrained Cluster Analysis DM:II-1
Chapter DM:II II. Cluster Analysis Cluster Analysis Basics Hierarchical Cluster Analysis Iterative Cluster Analysis Density-Based Cluster Analysis Cluster Evaluation Constrained Cluster Analysis DM:II-1
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
DATA EMBEDDING IN TEXT FOR A COPIER SYSTEM
 DATA EMBEDDING IN TEXT FOR A COPIER SYSTEM Anoop K. Bhattacharjya and Hakan Ancin Epson Palo Alto Laboratory 3145 Porter Drive, Suite 104 Palo Alto, CA 94304 e-mail: {anoop, ancin}@erd.epson.com Abstract
DATA EMBEDDING IN TEXT FOR A COPIER SYSTEM Anoop K. Bhattacharjya and Hakan Ancin Epson Palo Alto Laboratory 3145 Porter Drive, Suite 104 Palo Alto, CA 94304 e-mail: {anoop, ancin}@erd.epson.com Abstract
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
RECOGNIZING TYPESET DOCUMENTS USING WALSH TRANSFORMATION. Attila Fazekas and András Hajdu University of Debrecen 4010, Debrecen PO Box 12, Hungary
 RECOGNIZING TYPESET DOCUMENTS USING WALSH TRANSFORMATION Attila Fazekas and András Hajdu University of Debrecen 4010, Debrecen PO Box 12, Hungary Abstract. In this paper we present an effective character
RECOGNIZING TYPESET DOCUMENTS USING WALSH TRANSFORMATION Attila Fazekas and András Hajdu University of Debrecen 4010, Debrecen PO Box 12, Hungary Abstract. In this paper we present an effective character
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Clustering. CS294 Practical Machine Learning Junming Yin 10/09/06
 Clustering CS294 Practical Machine Learning Junming Yin 10/09/06 Outline Introduction Unsupervised learning What is clustering? Application Dissimilarity (similarity) of objects Clustering algorithm K-means,
Clustering CS294 Practical Machine Learning Junming Yin 10/09/06 Outline Introduction Unsupervised learning What is clustering? Application Dissimilarity (similarity) of objects Clustering algorithm K-means,
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
The Institute of Telecommunications and Computer Sciences, UTP University of Science and Technology, Bydgoszcz , Poland
 Computer Technology and Application 6 (2015) 64-69 doi: 10.17265/1934-7332/2015.02.002 D DAVID PUBLISHIN An Image Analysis of Breast Thermograms Ryszard S. Choras The Institute of Telecommunications and
Computer Technology and Application 6 (2015) 64-69 doi: 10.17265/1934-7332/2015.02.002 D DAVID PUBLISHIN An Image Analysis of Breast Thermograms Ryszard S. Choras The Institute of Telecommunications and
Lecture on Modeling Tools for Clustering & Regression
 Lecture on Modeling Tools for Clustering & Regression CS 590.21 Analysis and Modeling of Brain Networks Department of Computer Science University of Crete Data Clustering Overview Organizing data into
Lecture on Modeling Tools for Clustering & Regression CS 590.21 Analysis and Modeling of Brain Networks Department of Computer Science University of Crete Data Clustering Overview Organizing data into
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Capturing Topology in Graph Pattern Matching
 Capturing Topology in Graph Pattern Matching Shuai Ma, Yang Cao, Wenfei Fan, Jinpeng Huai, Tianyu Wo University of Edinburgh Graphs are everywhere, and quite a few are huge graphs! File systems Databases
Capturing Topology in Graph Pattern Matching Shuai Ma, Yang Cao, Wenfei Fan, Jinpeng Huai, Tianyu Wo University of Edinburgh Graphs are everywhere, and quite a few are huge graphs! File systems Databases
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Clustering and Visualisation of Data
 Clustering and Visualisation of Data Hiroshi Shimodaira January-March 28 Cluster analysis aims to partition a data set into meaningful or useful groups, based on distances between data points. In some
Clustering and Visualisation of Data Hiroshi Shimodaira January-March 28 Cluster analysis aims to partition a data set into meaningful or useful groups, based on distances between data points. In some
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Active Appearance Models
 Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
A 3D Point Cloud Registration Algorithm based on Feature Points
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A 3D Point Cloud Registration Algorithm based on Feature Points Yi Ren 1, 2, a, Fucai Zhou 1, b 1 School
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A 3D Point Cloud Registration Algorithm based on Feature Points Yi Ren 1, 2, a, Fucai Zhou 1, b 1 School
Single Subject Demo Data Instructions 1) click "New" and answer "No" to the "spatially preprocess" question.
 click New and answer No to the spatially preprocess question.") (1) conn - Functional connectivity toolbox v1.0 Single Subject Demo Data Instructions 1) click "New" and answer "No" to the "spatially preprocess" question. 2) in "Basic" enter "1" subject, "6" seconds
(1) conn - Functional connectivity toolbox v1.0 Single Subject Demo Data Instructions 1) click "New" and answer "No" to the "spatially preprocess" question. 2) in "Basic" enter "1" subject, "6" seconds
Modern Medical Image Analysis 8DC00 Exam
 Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Content-based Image Retrieval (CBIR)
") Content-based Image Retrieval (CBIR) Content-based Image Retrieval (CBIR) Searching a large database for images that match a query: What kinds of databases? What kinds of queries? What constitutes a match?
Content-based Image Retrieval (CBIR) Content-based Image Retrieval (CBIR) Searching a large database for images that match a query: What kinds of databases? What kinds of queries? What constitutes a match?
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Albert M. Vossepoel. Center for Image Processing
 Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course:
Albert M. Vossepoel www.ph.tn.tudelft.nl/~albert scene image formation sensor pre-processing image enhancement image restoration texture filtering segmentation user analysis classification CBP course: