3D SCANNER: is any device that
|
|
|
- Jack Morgan
- 6 years ago
- Views:
Transcription
1 DEFINITIONS 3D SCANNER: is any device that - collects 3D coordinates of a given region of an object surface - automatically and in a systematic pattern - at a high rate - achieving the results (i.e. 3D coordinates) in (near) real time. There is no generally accepted definition concerning instruments which are considered to be 3D scanners. Some classification will be proposed. info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 1
 In addition to the 3D coordinates the scanner may or may not deliver")
2 DEFINITIONS 3D scanner basic output: range map, point cloud, point model, scans,... (a lot of points, with known 3D coordinates in the same reference system) In addition to the 3D coordinates the scanner may or may not deliver reflectivity values (or RGB values) 3D SCANNING SYSTEMS 2

3 3D SCANNING VS TOPOGRAPHY Pros&Cons Topographic surveys + High accuracy + Homogeneous overall accuracy + Sound scientific indicators for quality assurance of the final product + Good for plans and cross sections +/- Mainly good only for objects of low complexity, otherwise not cost/time effective - Requires more time for field work - Point-wise mapping, no texture mapping Laser Scanning + Good for complex continuous surfaces + Good for surface analysis and visualization - Edges cannot be extracted - Line drawings cannot be derived - Huge amount of data to handle info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 3
4 CLASSIFICATION Stationary/Mobile Terrestrial laser scanners (TLS) Aerial laser scanners Principles of operation Range scanners Triangulation scanners Range measurement principles Time-of-flight Phase shift 3D SCANNING SYSTEMS 4

5 LASER AEREI GEOMATICS FOR CONSERVATION & COMMUNICATION OF CULTURAL HERITAGE LABORATORY AIRBORN SYSTEMS 3D SCANNING SYSTEMS 5

6 DSM & DTM DSM DTM 3D SCANNING SYSTEMS 6



7 TERRESTRIAL SYSTEMS Ground Based Laser Scanner: As a Total Station, they measure distances corresponding to a predefined angular step info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 7

 by matching aerial and")
8 LIDAR AND TLS DATA INTEGRATION scanning georeferencing aligned data 3D object aerial lidar TLS GPS + IMU data GPS/TS data 3D point model D. Visintini, B. Fico, F. Crosilla, F. Guerra 3D virtual model of the Gorizia downtown (Italy) by matching aerial and terrestrial surveying techniques info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 8
9 TRIANGULATION SCANNERS Triangulation scanner It measures angles corrisponding to a fixed base Projector + one camera: - At one and of the base there is a transmitting device, sending a laser beam at a defined, incrementally changed angle (thanks to a rotating mirror) - At the other end of the base there is a camera which detects the laser spot (or line) on the object. 3D coordinates can be derived from the resulting triangle The accuracy of the distance between instrument and object decreases with the square of this distance. info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 9
10 TRIANGULATION SCANNERS scanner a triangolazione - base di lunghezza fissa misurano angoli corrispondenti ad una distanza predefinita (base) Projector + two cameras: - Two digital cameras are fixed at the ends of a fixed base - A projector send a laser beam, or strep, or pattern (moving independently from the cameras) 3D coordinates are computed on the same base of the previous system. Same observation about accuracy. info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 10



11 TRIANGULATION SCANNERS Object Video In PC (control unit) RS info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 11


12 TRIANGULATION SCANNERS Lab 3D SCANNING SYSTEMS 12


13 TRIANGULATION SCANNERS 3D SCANNING SYSTEMS 13
14 PRINCIPI di FUNZIONAMENTO GEOMATICS FOR CONSERVATION & COMMUNICATION OF CULTURAL HERITAGE LABORATORY RANGE MEASUREMENT PRINCIPLES range scanners they measure distances corresponding to predefined angular steps - Time of flight A laser pulse is sent to the object and the distance between transmitter and reflecting surface is computed from the travel time between signal transmission and reception The accuracy can be assumed as independent from the distance - Phase shift Better accuracy, but it requires higher energy for the coming back signal, lowering the range info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 14
15 PRECISIONI e PORTATE GEOMATICS FOR CONSERVATION & COMMUNICATION OF CULTURAL HERITAGE LABORATORY info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 15

 and cost (less")
16 TECHNICAL SPECIFICATIONS Scanning rate - 100pts/s to pts/s, depending on principle of operation - set up and moving time needs to be considered Field of view - one axe or two axes rotation scanner - the acquired window/panorama can be expressed by an orizontal and a vertical angle - it is necessary to balance quality (pseudo-orthogonality scan positions) and cost (less scans) info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 16
 - The measured point is moved orthogonally to the range direction Angular accuracy: ±125µrad (v.")
17 TECHNICAL SPECIFICATIONS Angolar accuracy - It is related to constructive techniques (i.e. mechanical devices devoted to deflect the spot) - The measured point is moved orthogonally to the range direction Angular accuracy: ±125µrad (v. Leica HDS6000/7000) -> The corresponding error at a distance of 50 m is: x 50 ~ 0.006m info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 17
18 TECHNICAL SPECIFICATIONS Distance accuracy - The measured point is moved along the range direction info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 18
19 Nowaday the 3D accuracy (both the effects of angualar and distance accuracy) for phase shift and time of flight laser scanners can be almost the same. Others specifications can change significantly: PS reach (in general) an higher scan rate than the TOF. 3D SCANNING SYSTEMS 19
20 TECHNICAL SPECIFICATIONS Scan resolution - Points recorder by the same scan position are equally spaced considering a sspherical surface centered on the scanner - scan resolution means the space between two adjacent points, but also the quality of a set of data, i.e. the capability to describe small details on the surface - it states the density of points data info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 20

21 TECHNICAL SPECIFICATIONS With the same resolution setting, the measured points will be dense or sparse depending on the distance and position of the object. 3D SCANNING SYSTEMS 21

22 TECHNICAL SPECIFICATIONS Spot size - the measuring beam is normally focused at a predefined distance -> it impacts on the object surface with a reflective area or spot size - it is related to the capability to describe small details on the surface - a scan resolution lower than the spot size involves an over-sampling HDS6000 data info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 22



23 TECHNICAL SPECIFICATIONS Mixed pixels - when the reflective area is ditributed on different surfaces, the measured point does not belong to any of them The same detail scanned by instruments with different spot size: when the spot hits on a breakline a mixed pixel is recorded info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 23
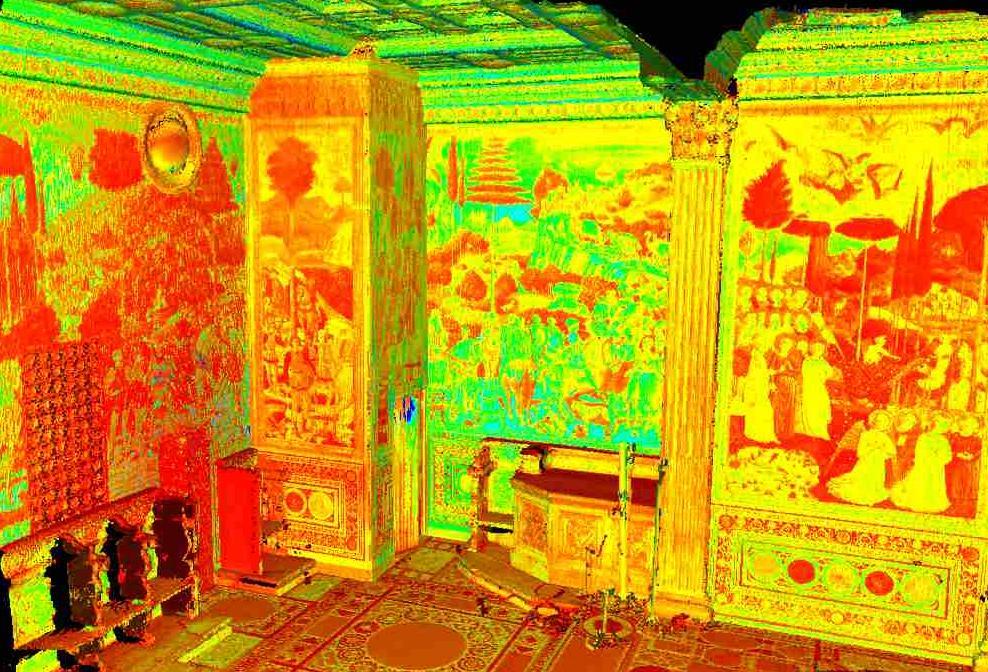
24 TECHNICAL SPECIFICATIONS Real ranges - depends on material, roughness, colors, wetness, angle of incidence Reflectivity value - Useful to better understanding the point model - Allow to automatically recognize specific targets Some biases have been observed, due to material and chromatic characteristics of the surface: unfavorable conditions are scan positions almost orthogonal to highly reflective surfaces, and scans facing the sun (a digital camera can be combined to the scan head) info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 24

25 TECHNICAL SPECIFICATIONS 3D SCANNING SYSTEMS 25

26 TECHNICAL SPECIFICATIONS 3D SCANNING SYSTEMS 26
 -Useful for data")

27 TECHNICAL SPECIFICATIONS Automatic target recognition (software) -Useful for data alignement - 3D or plane target info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 27


28 HOW MANY POINTS ARE THERE IN A SCAN? Resolution: 360 /5000= pt/ 5000 x 2150 > 10 million pts info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 28

29 MODELLO DI PUNTI Un modello è un referente significativo dell oggetto (sostituto della realtà semplificato/sintetico): per descriverlo elimina gli elementi ridondanti e enfatizza quelli ritenuti più importanti Un modello di punti è proprio l opposto, essendo costituito da elementi ridondanti ed indifferenziati. Gli elaborati che derivano dalle operazioni di misura : non ricreano l oggetto nella sua integrità ma ne danno una caricatura maligna [M. Cunietti] info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 29


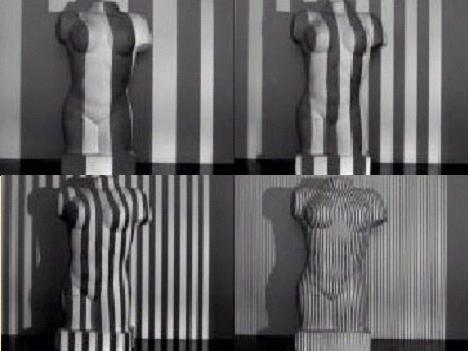
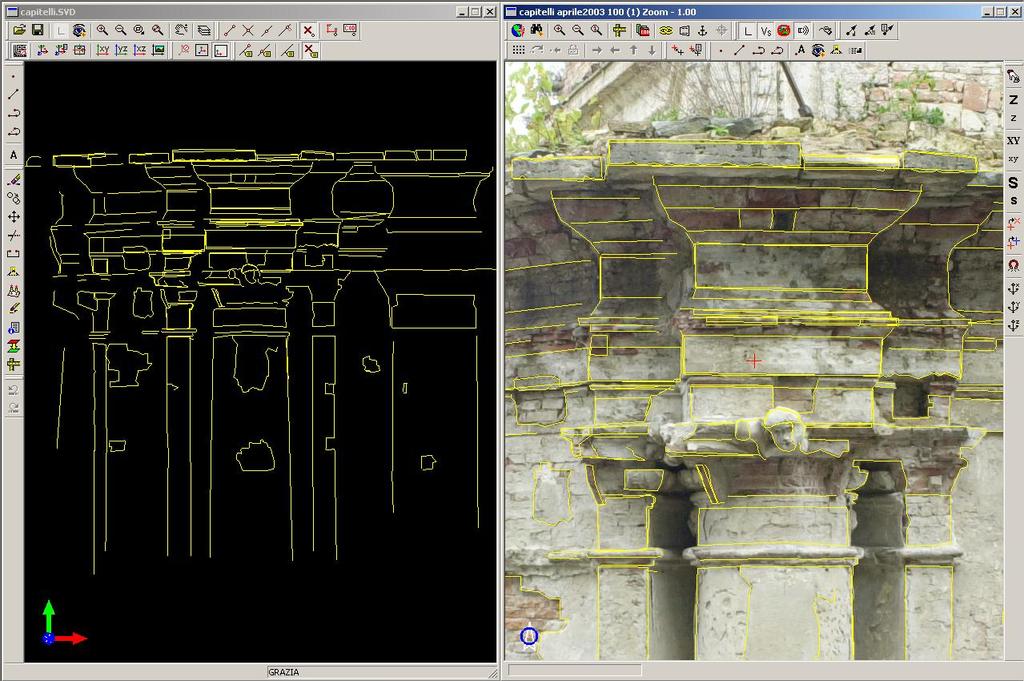
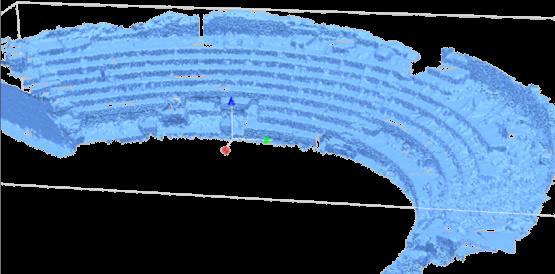
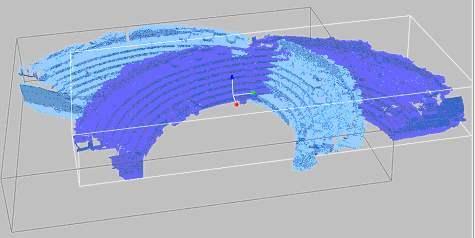
30 Photogrammetry and topography: breaklines representation 3D scanning systems: high resolution surface sampling 3D MODELS 3D SCANNING SYSTEMS 30
31 3D MODELS 3D SCANNING SYSTEMS 31


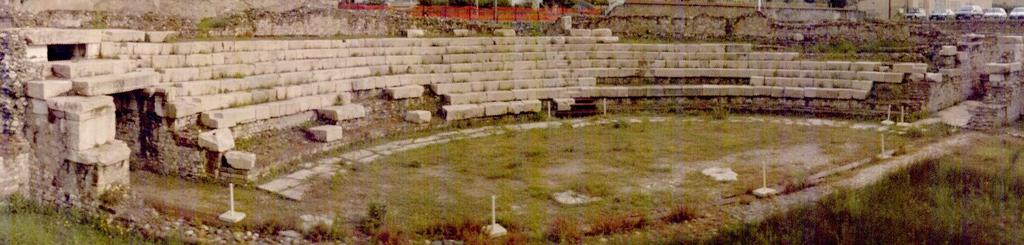
32 DATA ACQUISITION Planning the survey The scans positions depend on the shape and size of the object 3D SCANNING SYSTEMS 32


33 DATA ACQUISITION For a closed room in some cases one scan is enough; more often, in order to completly scan all the surfaces, more scans are nedeed. info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 33


34 DATA ACQUISITION 3D SCANNING SYSTEMS 34

35 DATA ACQUISITION Sketches -Outline of the area, rooms sketches,... - Scanner positions, target positions, model and name info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 35

36 DATA ACQUISITION 3D SCANNING SYSTEMS 36


37 DATA ACQUISITION 3D SCANNING SYSTEMS 37

38 DATA ACQUISITION 3D SCANNING SYSTEMS 38
39 DATA ALIGNMENT Data acquired by different scans need to be aligned in the same reference system In architectural or landscape application it is useful to geo-reference data Data can be aligned through homologous points or overlapped areas 3D SCANNING SYSTEMS 39

40 DATA ALIGNMENT 3D SCANNING SYSTEMS 40

 otherwise (scaffolding,")
 info@geomaticaeconservazione.")
41 DATA CLEANING Partially automatic process with filters based on range, manually (and time consuming) otherwise (scaffolding, vegetation, people, cars,...) 3D SCANNING SYSTEMS 41
42 3D MODEL ELABORATION Model partitioning (for very big size projects): Outliers filtering Noise reduction: improves data quality by removing speckle effect Sampling data (random, grid, curvature sampling) 3D SCANNING SYSTEMS 42



43 SURFACE MODELS Triangulation is the process to build a triangular mesh starting from points A mesh is a collection of vertices, edges and triangular faces that defines the shape of an object. Triangular faces must be continuos, not overlapped, sharing the adjacent edge. info@geomaticaeconservazione.it 3D SCANNING SYSTEMS 43


44 SURFACE MODELS Normal correction Holes filling Mesh reduction (Smoothing) 3D SCANNING SYSTEMS 44
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV OCT D IMAGE FUSION
 GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING?
 3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL LASER SCANNING
 JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL
JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL
BUILDING DETECTION AND STRUCTURE LINE EXTRACTION FROM AIRBORNE LIDAR DATA
 BUILDING DETECTION AND STRUCTURE LINE EXTRACTION FROM AIRBORNE LIDAR DATA C. K. Wang a,, P.H. Hsu a, * a Dept. of Geomatics, National Cheng Kung University, No.1, University Road, Tainan 701, Taiwan. China-
BUILDING DETECTION AND STRUCTURE LINE EXTRACTION FROM AIRBORNE LIDAR DATA C. K. Wang a,, P.H. Hsu a, * a Dept. of Geomatics, National Cheng Kung University, No.1, University Road, Tainan 701, Taiwan. China-
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN
 NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
3D recording of archaeological excavation
 5 th International Conference Remote Sensing in Archaeology The Age of Sensing 13-15 October 2014 - Duke University 3D recording of archaeological excavation Stefano Campana UNIVERSITY of CAMBRIDGE Faculty
5 th International Conference Remote Sensing in Archaeology The Age of Sensing 13-15 October 2014 - Duke University 3D recording of archaeological excavation Stefano Campana UNIVERSITY of CAMBRIDGE Faculty
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
MODELING CITY HALL S FAÇADE USING LASER SCANNING TECHNOLOGY
 Преглед НЦД 15 (2009), 59 63 Vladimir Pajić, Dušan Jovanović Miro Govedarica (Faculty of Technical Sciences, Novi Sad, Serbia) MODELING CITY HALL S FAÇADE USING LASER SCANNING TECHNOLOGY Abstract. This
Преглед НЦД 15 (2009), 59 63 Vladimir Pajić, Dušan Jovanović Miro Govedarica (Faculty of Technical Sciences, Novi Sad, Serbia) MODELING CITY HALL S FAÇADE USING LASER SCANNING TECHNOLOGY Abstract. This
N.J.P.L.S. An Introduction to LiDAR Concepts and Applications
 N.J.P.L.S. An Introduction to LiDAR Concepts and Applications Presentation Outline LIDAR Data Capture Advantages of Lidar Technology Basics Intensity and Multiple Returns Lidar Accuracy Airborne Laser
N.J.P.L.S. An Introduction to LiDAR Concepts and Applications Presentation Outline LIDAR Data Capture Advantages of Lidar Technology Basics Intensity and Multiple Returns Lidar Accuracy Airborne Laser
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology. Maziana Muhamad
 Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
2010 LiDAR Project. GIS User Group Meeting June 30, 2010
 2010 LiDAR Project GIS User Group Meeting June 30, 2010 LiDAR = Light Detection and Ranging Technology that utilizes lasers to determine the distance to an object or surface Measures the time delay between
2010 LiDAR Project GIS User Group Meeting June 30, 2010 LiDAR = Light Detection and Ranging Technology that utilizes lasers to determine the distance to an object or surface Measures the time delay between
3D Laser Scanner VS1000 User Manual
 3D Laser Scanner VS1000 User Manual 1 VS1000 Introduction SMART MAX GEOSYSTEMS CO., LTD VS1000 3D Laser Scanner based on pulses ranging principle, could quick acquire massive point cloud data from the
3D Laser Scanner VS1000 User Manual 1 VS1000 Introduction SMART MAX GEOSYSTEMS CO., LTD VS1000 3D Laser Scanner based on pulses ranging principle, could quick acquire massive point cloud data from the
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
POINT CLOUDS AND DERIVATIVES FOR NATIONWIDE GEOSPATIAL INFORMATION GEORGE VOSSELMAN
 POINT CLOUDS AND DERIVATIVES FOR NATIONWIDE GEOSPATIAL INFORMATION GEORGE VOSSELMAN OVERVIEW Point cloud generation and quality control New lidar technologies Dense matching Updating nationwide point clouds
POINT CLOUDS AND DERIVATIVES FOR NATIONWIDE GEOSPATIAL INFORMATION GEORGE VOSSELMAN OVERVIEW Point cloud generation and quality control New lidar technologies Dense matching Updating nationwide point clouds
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Airborne Laser Scanning: Remote Sensing with LiDAR
 Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS. Y. Postolov, A. Krupnik, K. McIntosh
 REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS Y. Postolov, A. Krupnik, K. McIntosh Department of Civil Engineering, Technion Israel Institute of Technology, Haifa,
REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS Y. Postolov, A. Krupnik, K. McIntosh Department of Civil Engineering, Technion Israel Institute of Technology, Haifa,
FROM THE ACQUISITION TO THE REPRESENTATION: QUALITY EVALUATION OF A CLOSE RANGE MODEL
 FROM THE ACQUISITION TO THE REPRESENTATION: QUALITY EVALUATION OF A CLOSE RANGE MODEL G. Tucci, V. Bonora DINSE, Facoltà di Architettura, Politecnico di Torino, Turin, Italy - (grazia.tucci, valentina.bonora)
FROM THE ACQUISITION TO THE REPRESENTATION: QUALITY EVALUATION OF A CLOSE RANGE MODEL G. Tucci, V. Bonora DINSE, Facoltà di Architettura, Politecnico di Torino, Turin, Italy - (grazia.tucci, valentina.bonora)
Snow cover change detection with laser scanning range and brightness measurements
 Snow cover change detection with laser scanning range and brightness measurements Sanna Kaasalainen, Harri Kaartinen, Antero Kukko, Henri Niittymäki Department of Remote Sensing and Photogrammetry 5th
Snow cover change detection with laser scanning range and brightness measurements Sanna Kaasalainen, Harri Kaartinen, Antero Kukko, Henri Niittymäki Department of Remote Sensing and Photogrammetry 5th
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Automated Processing of Terrestrial Mid-Range Laser Scanner Data for Restoration Documentation at Millimeter Scale
 Automated Processing of Terrestrial Mid-Range Laser Scanner Data for Restoration Documentation at Millimeter Scale Peter DORNINGER / Clemens NOTHEGGER Vienna University of Technology, Christian Doppler
Automated Processing of Terrestrial Mid-Range Laser Scanner Data for Restoration Documentation at Millimeter Scale Peter DORNINGER / Clemens NOTHEGGER Vienna University of Technology, Christian Doppler
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE. Matthew P. Tait
 POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
Tree height measurements and tree growth estimation in a mire environment using digital surface models
 Tree height measurements and tree growth estimation in a mire environment using digital surface models E. Baltsavias 1, A. Gruen 1, M. Küchler 2, P.Thee 2, L.T. Waser 2, L. Zhang 1 1 Institute of Geodesy
Tree height measurements and tree growth estimation in a mire environment using digital surface models E. Baltsavias 1, A. Gruen 1, M. Küchler 2, P.Thee 2, L.T. Waser 2, L. Zhang 1 1 Institute of Geodesy
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018
 a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring at Different Ambient Conditions
 World Applied Sciences Journal 34 (12): 1748-1753, 2016 ISSN 1818-4952 IDOSI Publications, 2016 DOI: 10.5829/idosi.wasj.2016.1748.1753 Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring
World Applied Sciences Journal 34 (12): 1748-1753, 2016 ISSN 1818-4952 IDOSI Publications, 2016 DOI: 10.5829/idosi.wasj.2016.1748.1753 Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
UAS based laser scanning for forest inventory and precision farming
 UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Digital Preservation of the Aurelius Church and the Hirsau Museum Complex by Means of HDS and Photogrammetric Texture Mapping
 Master Thesis Ruxandra MOROSAN Ruxandra MOROSAN Digital Preservation of the Aurelius Church and the Hirsau Museum Complex by Means of HDS and Photogrammetric Texture Mapping Duration of the Thesis: 6 months
Master Thesis Ruxandra MOROSAN Ruxandra MOROSAN Digital Preservation of the Aurelius Church and the Hirsau Museum Complex by Means of HDS and Photogrammetric Texture Mapping Duration of the Thesis: 6 months
Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning
 ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
ISPRS / CIPA Workshop «UNDERWATER 3D RECORDING & MODELING» 16 17 April 2015 Piano di Sorrento (Napoli), Italy Building a 3D reference model for canal tunnel surveying using SONAR and LASER scanning E.
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
Airborne LiDAR Data Acquisition for Forestry Applications. Mischa Hey WSI (Corvallis, OR)
") Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas
 Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas Nizar ABO AKEL, Ofer ZILBERSTEIN and Yerach DOYTSHER, Israel Key words: LIDAR, DSM, urban areas, DTM extraction. SUMMARY Although LIDAR
Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas Nizar ABO AKEL, Ofer ZILBERSTEIN and Yerach DOYTSHER, Israel Key words: LIDAR, DSM, urban areas, DTM extraction. SUMMARY Although LIDAR
STATUS OF AIRBORNE OBLIQUE IMAGING EUROSDR COMMISSION I PROJECT OBLIQUE IMAGERY. Markus Gerke May 15, 2014
 STATUS OF AIRBORNE OBLIQUE IMAGING EUROSDR COMMISSION I PROJECT OBLIQUE IMAGERY Markus Gerke May 15, 2014 THE FIRST AIRBORNE PHOTOS WERE OBLIQUE First recorded aerial photograph in the US (Boston), by
STATUS OF AIRBORNE OBLIQUE IMAGING EUROSDR COMMISSION I PROJECT OBLIQUE IMAGERY Markus Gerke May 15, 2014 THE FIRST AIRBORNE PHOTOS WERE OBLIQUE First recorded aerial photograph in the US (Boston), by
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Light Detection and Ranging (LiDAR) Radiohead House of Cards
 Radiohead House of Cards") Light Detection and Ranging (LiDAR) Radiohead House of Cards http://the-moni-blog.blogspot.com/2009/03/lidar-is-going-mainstream-mtv-baby.html h =? Laser Vision GPS + IMU θ H X a h Types of aerial sensors
Light Detection and Ranging (LiDAR) Radiohead House of Cards http://the-moni-blog.blogspot.com/2009/03/lidar-is-going-mainstream-mtv-baby.html h =? Laser Vision GPS + IMU θ H X a h Types of aerial sensors
APPENDIX E2. Vernal Pool Watershed Mapping
 APPENDIX E2 Vernal Pool Watershed Mapping MEMORANDUM To: U.S. Fish and Wildlife Service From: Tyler Friesen, Dudek Subject: SSHCP Vernal Pool Watershed Analysis Using LIDAR Data Date: February 6, 2014
APPENDIX E2 Vernal Pool Watershed Mapping MEMORANDUM To: U.S. Fish and Wildlife Service From: Tyler Friesen, Dudek Subject: SSHCP Vernal Pool Watershed Analysis Using LIDAR Data Date: February 6, 2014
LIDAR MAPPING FACT SHEET
 1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam
 Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring
 Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring Lienhart, W. Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Austria Abstract
Critical Aspects when using Total Stations and Laser Scanners for Geotechnical Monitoring Lienhart, W. Institute of Engineering Geodesy and Measurement Systems, Graz University of Technology, Austria Abstract
Trimble Geospatial Division Integrated Solutions for Geomatics professions. Volker Zirn Regional Sales Representative
 Trimble Geospatial Division Integrated Solutions for Geomatics professions Volker Zirn Regional Sales Representative 1 Agenda Trimble GeoSpatial Division Airborne System Solutions Trimble Inpho Software
Trimble Geospatial Division Integrated Solutions for Geomatics professions Volker Zirn Regional Sales Representative 1 Agenda Trimble GeoSpatial Division Airborne System Solutions Trimble Inpho Software
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
A Comparison of Laser Scanners for Mobile Mapping Applications
 A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
USE THE 3D LASER SCANNING FOR DOCUMENTATION THE RIGA CATHEDRAL IN LATVIA
 USE THE 3D LASER SCANNING FOR DOCUMENTATION THE RIGA CATHEDRAL IN LATVIA Maris Kalinka, Elina Rutkovska, Department of Geomatic, Riga Technical University, Azenes 16-109, Riga, Latvia, geomatika@geomatika.lv
USE THE 3D LASER SCANNING FOR DOCUMENTATION THE RIGA CATHEDRAL IN LATVIA Maris Kalinka, Elina Rutkovska, Department of Geomatic, Riga Technical University, Azenes 16-109, Riga, Latvia, geomatika@geomatika.lv
HEURISTIC FILTERING AND 3D FEATURE EXTRACTION FROM LIDAR DATA
 HEURISTIC FILTERING AND 3D FEATURE EXTRACTION FROM LIDAR DATA Abdullatif Alharthy, James Bethel School of Civil Engineering, Purdue University, 1284 Civil Engineering Building, West Lafayette, IN 47907
HEURISTIC FILTERING AND 3D FEATURE EXTRACTION FROM LIDAR DATA Abdullatif Alharthy, James Bethel School of Civil Engineering, Purdue University, 1284 Civil Engineering Building, West Lafayette, IN 47907
A 3D scanning primer. Marco Callieri Matteo Dellepiane Visual Computig Lab ISTI-CNR
 A 3D scanning primer Marco Callieri Matteo Dellepiane Visual Computig Lab ISTI-CNR 0 Digital Models...... of real objects. You have seen lots of them. Digital representation of the surface of an object
A 3D scanning primer Marco Callieri Matteo Dellepiane Visual Computig Lab ISTI-CNR 0 Digital Models...... of real objects. You have seen lots of them. Digital representation of the surface of an object
Technical Considerations and Best Practices in Imagery and LiDAR Project Procurement
 Technical Considerations and Best Practices in Imagery and LiDAR Project Procurement Presented to the 2014 WV GIS Conference By Brad Arshat, CP, EIT Date: June 4, 2014 Project Accuracy A critical decision
Technical Considerations and Best Practices in Imagery and LiDAR Project Procurement Presented to the 2014 WV GIS Conference By Brad Arshat, CP, EIT Date: June 4, 2014 Project Accuracy A critical decision
COMPUTING SOLAR ENERGY POTENTIAL OF URBAN AREAS USING AIRBORNE LIDAR AND ORTHOIMAGERY
 COMPUTING SOLAR ENERGY POTENTIAL OF URBAN AREAS USING AIRBORNE LIDAR AND ORTHOIMAGERY Ryan Hippenstiel The Pennsylvania State University John A. Dutton e-education Institute 2217 Earth & Engineering Sciences
COMPUTING SOLAR ENERGY POTENTIAL OF URBAN AREAS USING AIRBORNE LIDAR AND ORTHOIMAGERY Ryan Hippenstiel The Pennsylvania State University John A. Dutton e-education Institute 2217 Earth & Engineering Sciences
Automated Processing for 3D Mosaic Generation, a Change of Paradigm
 Automated Processing for 3D Mosaic Generation, a Change of Paradigm Frank BIGNONE, Japan Key Words: 3D Urban Model, Street Imagery, Oblique imagery, Mobile Mapping System, Parallel processing, Digital
Automated Processing for 3D Mosaic Generation, a Change of Paradigm Frank BIGNONE, Japan Key Words: 3D Urban Model, Street Imagery, Oblique imagery, Mobile Mapping System, Parallel processing, Digital
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
THE COLORED COMPARISON OF THE WALL SCULPTURE WITH 3D LASER SCANNER AND ORTHOPHOTO
 THE COLORED COMPARISON OF THE WALL SCULPTURE WITH 3D LASER SCANNER AND ORTHOPHOTO Hirotoshi KURASHIGE, Jun KATO, Shozo NISHIMURA Creative Department, Keisoku Research Consultant Co, 1-665-1 Fukuda, Higashi-ku,
THE COLORED COMPARISON OF THE WALL SCULPTURE WITH 3D LASER SCANNER AND ORTHOPHOTO Hirotoshi KURASHIGE, Jun KATO, Shozo NISHIMURA Creative Department, Keisoku Research Consultant Co, 1-665-1 Fukuda, Higashi-ku,
Multiray Photogrammetry and Dense Image. Photogrammetric Week Matching. Dense Image Matching - Application of SGM
 Norbert Haala Institut für Photogrammetrie Multiray Photogrammetry and Dense Image Photogrammetric Week 2011 Matching Dense Image Matching - Application of SGM p q d Base image Match image Parallax image
Norbert Haala Institut für Photogrammetrie Multiray Photogrammetry and Dense Image Photogrammetric Week 2011 Matching Dense Image Matching - Application of SGM p q d Base image Match image Parallax image
Terrestrial 3D laser scanning Practical aspects
 Terrestrial 3D laser scanning Practical aspects ISPRS WG VI/5&SC Summer School 2007 by Gregor Bilban 3D laser scanning Benefits Lower data collection costs Reduction or elimination of re-visits More accurate
Terrestrial 3D laser scanning Practical aspects ISPRS WG VI/5&SC Summer School 2007 by Gregor Bilban 3D laser scanning Benefits Lower data collection costs Reduction or elimination of re-visits More accurate
Development of Methodology to Identify the Areas where Buildings are Broken down by Earthquake using Airborne Laser Technology
 Development of Methodology to Identify the Areas where Buildings are Broken down by Earthquake using Airborne Laser Technology by Hiromichi Maruyama 1, Masuo Taguchi 1, Masanori Sugiyama 1 and Yoshinori
Development of Methodology to Identify the Areas where Buildings are Broken down by Earthquake using Airborne Laser Technology by Hiromichi Maruyama 1, Masuo Taguchi 1, Masanori Sugiyama 1 and Yoshinori
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Photo based Terrain Data Acquisition & 3D Modeling
 Photo based Terrain Data Acquisition & 3D Modeling June 7, 2013 Howard Hahn Kansas State University Partial funding by: KSU Office of Research and Sponsored Programs Introduction: Need Application 1 Monitoring
Photo based Terrain Data Acquisition & 3D Modeling June 7, 2013 Howard Hahn Kansas State University Partial funding by: KSU Office of Research and Sponsored Programs Introduction: Need Application 1 Monitoring
[Youn *, 5(11): November 2018] ISSN DOI /zenodo Impact Factor
![[Youn *, 5(11): November 2018] ISSN DOI /zenodo Impact Factor](/thumbs/91/105079225.jpg "[Youn *, 5(11): November 2018] ISSN DOI /zenodo Impact Factor") GLOBAL JOURNAL OF ENGINEERING SCIENCE AND RESEARCHES AUTOMATIC EXTRACTING DEM FROM DSM WITH CONSECUTIVE MORPHOLOGICAL FILTERING Junhee Youn *1 & Tae-Hoon Kim 2 *1,2 Korea Institute of Civil Engineering
GLOBAL JOURNAL OF ENGINEERING SCIENCE AND RESEARCHES AUTOMATIC EXTRACTING DEM FROM DSM WITH CONSECUTIVE MORPHOLOGICAL FILTERING Junhee Youn *1 & Tae-Hoon Kim 2 *1,2 Korea Institute of Civil Engineering
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
LASER SCANNING SUPPORTS ARCHITECTURAL MAPPINGS AND HISTORICAL URBAN VIEW ANALYSIS
 LASER SCANNING SUPPORTS ARCHITECTURAL MAPPINGS AND HISTORICAL URBAN VIEW ANALYSIS Daniela ORENI*, Francesco FASSI**, Raffaella BRUMANA**, Federico PRANDI**, Hande TUNCER** * DIAP - Politecnico di Milano
LASER SCANNING SUPPORTS ARCHITECTURAL MAPPINGS AND HISTORICAL URBAN VIEW ANALYSIS Daniela ORENI*, Francesco FASSI**, Raffaella BRUMANA**, Federico PRANDI**, Hande TUNCER** * DIAP - Politecnico di Milano
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Merging LiDAR Data with Softcopy Photogrammetry Data
 Merging LiDAR Data with Softcopy Photogrammetry Data Cindy McCallum WisDOT\Bureau of Technical Services Surveying & Mapping Section Photogrammetry Unit Overview Terms and processes Why use data from LiDAR
Merging LiDAR Data with Softcopy Photogrammetry Data Cindy McCallum WisDOT\Bureau of Technical Services Surveying & Mapping Section Photogrammetry Unit Overview Terms and processes Why use data from LiDAR
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
A 3D Scanner Based Technology for Land Levelling
 A 3D Scanner Based Technology for Land Levelling Kunal Chakraborti, Rupam Ghosh Student, Dept of Civil Engineering, Modern Institute of Engineering & Technology, Bandel, Hooghly, West Bengal, India ABSTRACT:
A 3D Scanner Based Technology for Land Levelling Kunal Chakraborti, Rupam Ghosh Student, Dept of Civil Engineering, Modern Institute of Engineering & Technology, Bandel, Hooghly, West Bengal, India ABSTRACT:
MODELING OF THE PLAN DA MATTUN ARCHAEOLOGICAL SITE USING A COMBINATION OF DIFFERENT SENSORS
 MODELING OF THE PLAN DA MATTUN ARCHAEOLOGICAL SITE USING A COMBINATION OF DIFFERENT SENSORS D. Novák, P. Tokarczyk*, P.W. Theiler Institute of Geodesy and Photogrammetry, ETH Zürich, 8093 Zürich, Switzerland
MODELING OF THE PLAN DA MATTUN ARCHAEOLOGICAL SITE USING A COMBINATION OF DIFFERENT SENSORS D. Novák, P. Tokarczyk*, P.W. Theiler Institute of Geodesy and Photogrammetry, ETH Zürich, 8093 Zürich, Switzerland
Integrating the Generations, FIG Working Week 2008,Stockholm, Sweden June 2008
 H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL
 JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL") Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL OVERVIEW JRC 3D Reconstructor is the well known multi-platform and multi-resolution software
Italian pavilion in 3D, project for EXPO 2015, Milan (Italy) JRC 3D RECONSTRUCTOR POWERFUL. ADVANCED. PROFESSIONAL OVERVIEW JRC 3D Reconstructor is the well known multi-platform and multi-resolution software
PHOTOGRAMMETRIC PROCESSING OF LOW ALTITUDE IMAGE SEQUENCES BY UNMANNED AIRSHIP
 PHOTOGRAMMETRIC PROCESSING OF LOW ALTITUDE IMAGE SEQUENCES BY UNMANNED AIRSHIP Yongjun Zhang School of Remote Sensing and Information Engineering, Wuhan University, Wuhan, Hubei, 430079, P.R. China - zhangyj@whu.edu.cn
PHOTOGRAMMETRIC PROCESSING OF LOW ALTITUDE IMAGE SEQUENCES BY UNMANNED AIRSHIP Yongjun Zhang School of Remote Sensing and Information Engineering, Wuhan University, Wuhan, Hubei, 430079, P.R. China - zhangyj@whu.edu.cn
SPOT-1 stereo images taken from different orbits with one month difference
 DSM Generation Almost all HR sensors are stereo capable. Some can produce even triplettes within the same strip (facilitating multi-image matching). Mostly SPOT (1-5) used for stereo and Ikonos (in spite
DSM Generation Almost all HR sensors are stereo capable. Some can produce even triplettes within the same strip (facilitating multi-image matching). Mostly SPOT (1-5) used for stereo and Ikonos (in spite
THE USE OF OPTICAL METHODS FOR LEAK TESTING DAMPERS
 DAAAM INTERNATIONAL SCIENTIFIC BOOK 2013 pp. 787-794 CHAPTER 47 THE USE OF OPTICAL METHODS FOR LEAK TESTING DAMPERS TOMASIAK, J. Abstract: The present paper presents the possible use of a portable structural
DAAAM INTERNATIONAL SCIENTIFIC BOOK 2013 pp. 787-794 CHAPTER 47 THE USE OF OPTICAL METHODS FOR LEAK TESTING DAMPERS TOMASIAK, J. Abstract: The present paper presents the possible use of a portable structural
Municipal Projects in Cambridge Using a LiDAR Dataset. NEURISA Day 2012 Sturbridge, MA
 Municipal Projects in Cambridge Using a LiDAR Dataset NEURISA Day 2012 Sturbridge, MA October 15, 2012 Jeff Amero, GIS Manager, City of Cambridge Presentation Overview Background on the LiDAR dataset Solar
Municipal Projects in Cambridge Using a LiDAR Dataset NEURISA Day 2012 Sturbridge, MA October 15, 2012 Jeff Amero, GIS Manager, City of Cambridge Presentation Overview Background on the LiDAR dataset Solar
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Open Pit Mines. Terrestrial LiDAR and UAV Aerial Triangulation for. Figure 1: ILRIS at work
 Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Experiments on Generation of 3D Virtual Geographic Environment Based on Laser Scanning Technique
 Experiments on Generation of 3D Virtual Geographic Environment Based on Laser Scanning Technique Jie Du 1, Fumio Yamazaki 2 Xiaoyong Chen 3 Apisit Eiumnoh 4, Michiro Kusanagi 3, R.P. Shrestha 4 1 School
Experiments on Generation of 3D Virtual Geographic Environment Based on Laser Scanning Technique Jie Du 1, Fumio Yamazaki 2 Xiaoyong Chen 3 Apisit Eiumnoh 4, Michiro Kusanagi 3, R.P. Shrestha 4 1 School
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
ASSETS DATA INVENTORY BASED ON BUILDING INFORMATION MODELLING
 ASSETS DATA INVENTORY BASED ON BUILDING INFORMATION MODELLING Asep Yusup Saptari (Surveying and Cadastre Research Group) Geodesy And Geomatic Earth Science And Engineering Faculty Institut Teknologi Bandung
ASSETS DATA INVENTORY BASED ON BUILDING INFORMATION MODELLING Asep Yusup Saptari (Surveying and Cadastre Research Group) Geodesy And Geomatic Earth Science And Engineering Faculty Institut Teknologi Bandung
UAS Campus Survey Project
 ARTICLE STUDENTS CAPTURING SPATIAL INFORMATION NEEDS UAS Campus Survey Project Texas A&M University- Corpus Christi, home to the largest geomatics undergraduate programme in Texas, USA, is currently undergoing
ARTICLE STUDENTS CAPTURING SPATIAL INFORMATION NEEDS UAS Campus Survey Project Texas A&M University- Corpus Christi, home to the largest geomatics undergraduate programme in Texas, USA, is currently undergoing
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES
 3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
THE USE OF ANISOTROPIC HEIGHT TEXTURE MEASURES FOR THE SEGMENTATION OF AIRBORNE LASER SCANNER DATA
 THE USE OF ANISOTROPIC HEIGHT TEXTURE MEASURES FOR THE SEGMENTATION OF AIRBORNE LASER SCANNER DATA Sander Oude Elberink* and Hans-Gerd Maas** *Faculty of Civil Engineering and Geosciences Department of
THE USE OF ANISOTROPIC HEIGHT TEXTURE MEASURES FOR THE SEGMENTATION OF AIRBORNE LASER SCANNER DATA Sander Oude Elberink* and Hans-Gerd Maas** *Faculty of Civil Engineering and Geosciences Department of
New Requirements for the Relief in the Topographic Databases of the Institut Cartogràfic de Catalunya
 New Requirements for the Relief in the Topographic Databases of the Institut Cartogràfic de Catalunya Blanca Baella, Maria Pla Institut Cartogràfic de Catalunya, Barcelona, Spain Abstract Since 1983 the
New Requirements for the Relief in the Topographic Databases of the Institut Cartogràfic de Catalunya Blanca Baella, Maria Pla Institut Cartogràfic de Catalunya, Barcelona, Spain Abstract Since 1983 the
AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY
 AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY G. Takahashi a, H. Takeda a, Y. Shimano a a Spatial Information Division, Kokusai Kogyo Co., Ltd., Tokyo, Japan - (genki_takahashi, hiroshi1_takeda,
AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY G. Takahashi a, H. Takeda a, Y. Shimano a a Spatial Information Division, Kokusai Kogyo Co., Ltd., Tokyo, Japan - (genki_takahashi, hiroshi1_takeda,
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
LORI COLLINS, RESEARCH ASSOCIATE PROFESSOR CONTRIBUTIONS BY: RICHARD MCKENZIE AND GARRETT SPEED, DHHC USF L IBRARIES
 LORI COLLINS, RESEARCH ASSOCIATE PROFESSOR CONTRIBUTIONS BY: RICHARD MCKENZIE AND GARRETT SPEED, DHHC USF L IBRARIES AERIAL AND TERRESTRIAL SURVEY WORKFLOWS Workflow from project planning applications
LORI COLLINS, RESEARCH ASSOCIATE PROFESSOR CONTRIBUTIONS BY: RICHARD MCKENZIE AND GARRETT SPEED, DHHC USF L IBRARIES AERIAL AND TERRESTRIAL SURVEY WORKFLOWS Workflow from project planning applications
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper