Opportunities of Scale
|
|
|
- Giles Hoover
- 5 years ago
- Views:
Transcription

1 Opportunities of Scale 11/07/17 Computational Photography Derek Hoiem, University of Illinois Most slides from Alyosha Efros Graphic from Antonio Torralba
2 Today s class Opportunities of Scale: Data-driven methods Scene completion Im2gps 3D reconstruction Colorizing Infinite zoom/panorama and much more


3 Google and massive data-driven algorithms A.I. for the postmodern world: all questions have already been answered many times, in many ways Google is dumb, the intelligence is in the data
4 Google Translate
5 Chinese Room John Searle (1980)
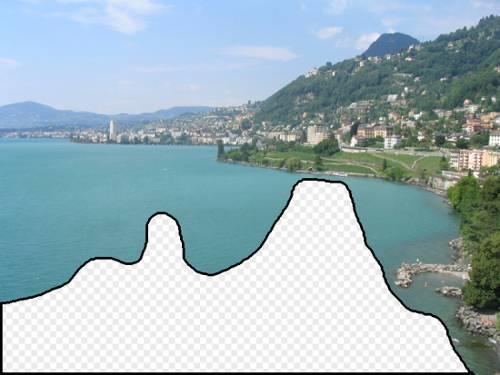
6 Image Completion Example [Hays and Efros. Scene Completion Using Millions of Photographs. SIGGRAPH 2007 and CACM October 2008.]
7 What should the missing region contain?
8
9
10
11 Which is the original? (a) (c) (b)
12 How it works Find a similar image from a large dataset Blend a region from that image into the hole Dataset
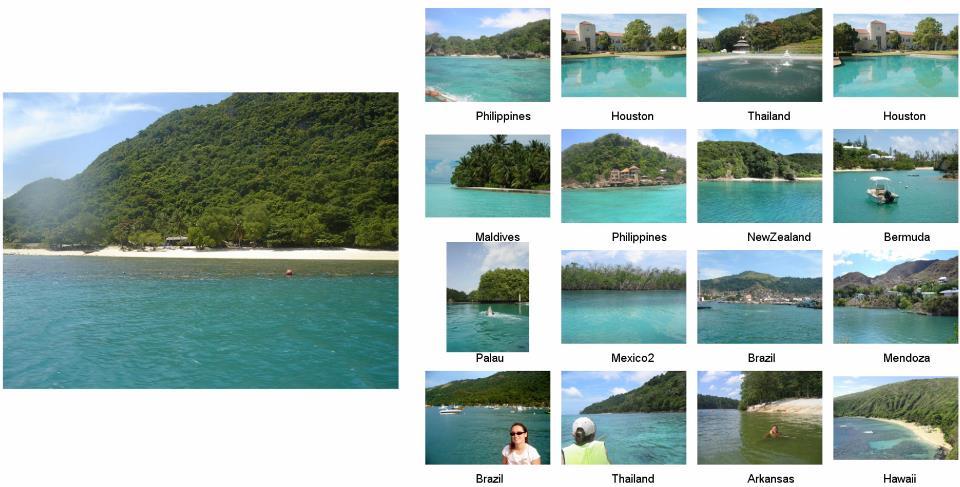
13 General Principal Huge Dataset Input Image Images Associated Info image matching Info from Most Similar Images Trick: If you have enough images, the dataset will contain very similar images that you can find with simple matching methods.
14 How many images is enough?









15 Nearest neighbors from a collection of 20 thousand images









16 Nearest neighbors from a collection of 2 million images
17 Image Data on the Internet Facebook (2014) 250 billion total, +350 million per day Facebook (2011) 6 billion images per month More than 100 petabytes of images/video Flickr (2010) 5 billion photographs 100+ million geotagged images Imageshack (as of 2009) 20 billion Facebook (as of 2009) 15 billion
18 Image completion: how it works [Hays and Efros. Scene Completion Using Millions of Photographs. SIGGRAPH 2007 and CACM October 2008.]
19 The Algorithm
20 Scene Matching
21 Scene Descriptor

22 Scene Descriptor Scene Gist Descriptor (Oliva and Torralba 2001)

23 Scene Descriptor + Scene Gist Descriptor (Oliva and Torralba 2001)

24 2 Million Flickr Images

25 200 total
26 Context Matching

27 Graph cut + Poisson blending


")
28 Result Ranking We assign each of the 200 results a score which is the sum of: The scene matching distance The context matching distance (color + texture) The graph cut cost
29
30
31

32
33
34
35



36 200 scene matches

37
38
39

40
41
42 Which is the original?

43
44

45

46 Diffusion Result
47 Efros and Leung result
48 Scene Completion Result

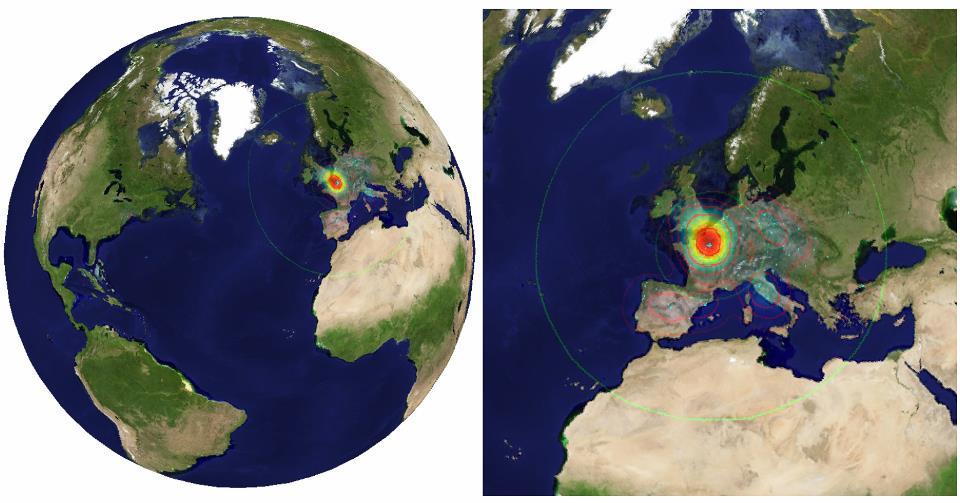
49 im2gps (Hays & Efros, CVPR 2008) 6 million geo-tagged Flickr images

50 How much can an image tell about its geographic location?

51
52
53 Im2gps

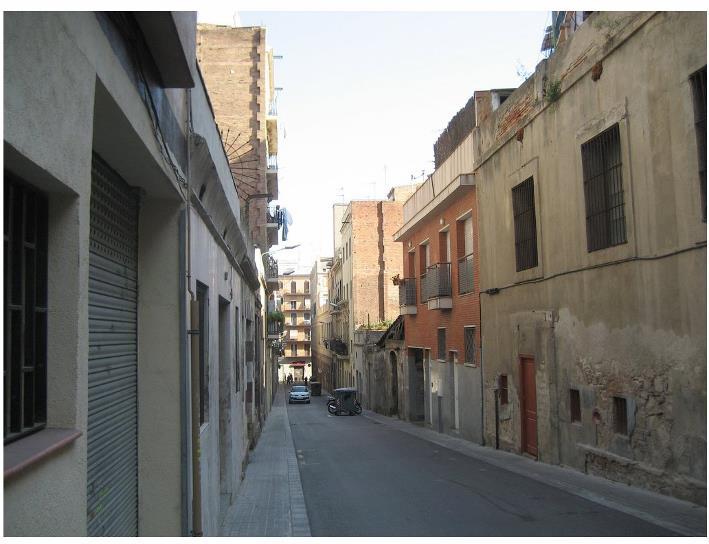
54 Example Scene Matches

55 Voting Scheme

56 im2gps
57

58

59 Population density ranking
60 Where is This? [Olga Vesselova, Vangelis Kalogerakis, Aaron Hertzmann, James Hays, Alexei A. Efros. Image Sequence Geolocation. ICCV 09]

61 Where is This?
62 Where are These? 15:14, June 18 th, :31, June 18 th, 2006

63 Where are These? 15:14, June 18 th, :31, June 18 th, :24, June 19 th, 2006
64 Results im2gps 10% (geo-loc within 400 km) temporal im2gps 56%


65 3D Reconstruction from Flickr Create detailed 3D scenes from thousands of consumer photographs Challenges include variations in season, lighting, occluding objects, etc.


66 3D Reconstruction from Flickr: How it works 1. Download ~10,000 images, convert to grayscale, compute SIFT keypoints 2. Match images 1. Get similar images with vocabulary tree (like in recognition from last class) 2. Match keypoints across similar images and perform geometric verification with RANSAC (similar to photo stitching) 3. Form a graph of matched images 4. 3D Reconstruction by triangulating points, bundle adjustment
67 Large-scale 3D Reconstruction Useful references Dense reconstruction: Towards Internet-scale Multiview Stereo, Furukawa et al., CVPR Sparse reconstruction: Building Rome in a Day, Goesler et al., ICCV Code: Bundler Software, OpenMVG
![Photo Clip Art [SG 07]](/docs-images/81/84615065/images/68-1.jpg "Inserting a single")


68 Photo Clip Art [SG 07] Inserting a single object -- still very hard! object size, orientation scene illumination Lalonde et al, SIGGRAPH 2007

![Clip Art [SG 07] Use](/docs-images/81/84615065/images/69-3.jpg "database to find")
69 Lalonde et al, SIGGRAPH 2007 Photo Clip Art [SG 07] Use database to find well-fitting object


70 CG2Real CG2Real: Improving the Realism of Computer Generated Images using a Large Collection of Photographs, Johnson, Dale, Avidan, Pfister, Freeman, Matusik, Tech. Rep. MIT-CSAIL-TR

71 Tour from a single image Scene matching with camera transformations





72 Tour from a single image Navigate the virtual space using intuitive motion controls
73 Video

74 Tiny Images 80 million tiny images: a large dataset for nonparametric object and scene recognition Antonio Torralba, Rob Fergus and William T. Freeman. PAMI

75
76 Human Scene Recognition

 Number of")


77 Powers of 10 Number of images on my hard drive: 10 4 Number of images seen during my first 10 years: 10 8 (3 images/second * 60 * 60 * 16 * 365 * 10 = ) Number of images seen by all humanity: ,456,367,669 humans 1 * 60 years * 3 images/second * 60 * 60 * 16 * 365 = 1 from Number of photons in the universe: Number of all 32x32 images: *32*3 ~



78 Scenes are unique









79 But not all scenes are so original
80 Lots Of Images A. Torralba, R. Fergus, W.T.Freeman. PAMI 2008
81 Lots Of Images A. Torralba, R. Fergus, W.T.Freeman. PAMI 2008

82 Lots Of Images

")

83 Automatic Colorization Input Color Transfer Color Transfer Matches (gray) Matches (w/ color) Avg Color of Match



 Avg of")
84 Automatic Colorization Input Color Transfer Color Transfer Matches (gray) Matches (w/ color) Avg Color of Match


85 How Deep Networks Work Learn better features to match regions or images High capacity to make good use of lots of data Revisiting Im2GPS in the Deep Learning Era, Vo, Jacobs, Hays 2017


86 SIGGRAPH 2017
87 Summary Many questions have been asked before, photos have been taken before Sometimes, we can shortcut hard problems by looking up the answer
88 Next class How the Kinect works
General Principal. Huge Dataset. Images. Info from Most Similar Images. Input Image. Associated Info
 Devin Montes General Principal Huge Dataset Input Image Images Associated Info image matching Info from Most Similar Images Hopefully, If you have enough images, the dataset will contain very similar images
Devin Montes General Principal Huge Dataset Input Image Images Associated Info image matching Info from Most Similar Images Hopefully, If you have enough images, the dataset will contain very similar images
Requesting changes to the grades, please write to me in an with descriptions. Move my office hours to the morning. 11am - 12:30pm Thursdays
 Lab1 graded. Requesting changes to the grades, please write to me in an email with descriptions. Move my office hours to the morning. 11am - 12:30pm Thursdays Internet-scale texture synthesis With slides
Lab1 graded. Requesting changes to the grades, please write to me in an email with descriptions. Move my office hours to the morning. 11am - 12:30pm Thursdays Internet-scale texture synthesis With slides
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Previous Lecture - Coded aperture photography
 Previous Lecture - Coded aperture photography Depth from a single image based on the amount of blur Estimate the amount of blur using and recover a sharp image by deconvolution with a sparse gradient prior.
Previous Lecture - Coded aperture photography Depth from a single image based on the amount of blur Estimate the amount of blur using and recover a sharp image by deconvolution with a sparse gradient prior.
Admin. Data driven methods. Overview. Overview. Parametric model of image patches. Data driven (Non parametric) Approach 3/31/2008
 Approach 3/31/2008") Admin Office hours straight after class today Data driven methods Assignment 3 out, due in 2 weeks Lecture 8 Projects.. Overview Overview Texture synthesis Quilting Image Analogies Super resolution Scene
Admin Office hours straight after class today Data driven methods Assignment 3 out, due in 2 weeks Lecture 8 Projects.. Overview Overview Texture synthesis Quilting Image Analogies Super resolution Scene
Can Similar Scenes help Surface Layout Estimation?
 Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Single Image Super-resolution. Slides from Libin Geoffrey Sun and James Hays
 Single Image Super-resolution Slides from Libin Geoffrey Sun and James Hays Cs129 Computational Photography James Hays, Brown, fall 2012 Types of Super-resolution Multi-image (sub-pixel registration) Single-image
Single Image Super-resolution Slides from Libin Geoffrey Sun and James Hays Cs129 Computational Photography James Hays, Brown, fall 2012 Types of Super-resolution Multi-image (sub-pixel registration) Single-image
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
FACE DETECTION AND LOCALIZATION USING DATASET OF TINY IMAGES
 FACE DETECTION AND LOCALIZATION USING DATASET OF TINY IMAGES Swathi Polamraju and Sricharan Ramagiri Department of Electrical and Computer Engineering Clemson University ABSTRACT: Being motivated by the
FACE DETECTION AND LOCALIZATION USING DATASET OF TINY IMAGES Swathi Polamraju and Sricharan Ramagiri Department of Electrical and Computer Engineering Clemson University ABSTRACT: Being motivated by the
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Matching and Predicting Street Level Images
 Matching and Predicting Street Level Images Biliana Kaneva 1, Josef Sivic 2, Antonio Torralba 1, Shai Avidan 3, and William T. Freeman 1 1 Massachusetts Institute of Technology {biliana,torralba,billf}@csail.mit.edu
Matching and Predicting Street Level Images Biliana Kaneva 1, Josef Sivic 2, Antonio Torralba 1, Shai Avidan 3, and William T. Freeman 1 1 Massachusetts Institute of Technology {biliana,torralba,billf}@csail.mit.edu
Social Tourism Using Photos
 Social Tourism Using Photos Mark Lenz Abstract Mobile phones are frequently used to determine one's location and navigation directions, and they can also provide a platform for connecting tourists with
Social Tourism Using Photos Mark Lenz Abstract Mobile phones are frequently used to determine one's location and navigation directions, and they can also provide a platform for connecting tourists with
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Segmenting Scenes by Matching Image Composites
 Segmenting Scenes by Matching Image Composites Bryan C. Russell 1 Alexei A. Efros 2,1 Josef Sivic 1 William T. Freeman 3 Andrew Zisserman 4,1 1 INRIA 2 Carnegie Mellon University 3 CSAIL MIT 4 University
Segmenting Scenes by Matching Image Composites Bryan C. Russell 1 Alexei A. Efros 2,1 Josef Sivic 1 William T. Freeman 3 Andrew Zisserman 4,1 1 INRIA 2 Carnegie Mellon University 3 CSAIL MIT 4 University
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Web-Scale Image Search and Their Applications
 Web-Scale Image Search and Their Applications Sung-Eui Yoon KAIST http://sglab.kaist.ac.kr Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing
Web-Scale Image Search and Their Applications Sung-Eui Yoon KAIST http://sglab.kaist.ac.kr Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing
Automatic Generation of An Infinite Panorama
 Automatic Generation of An Infinite Panorama Lisa H. Chan Alexei A. Efros Carnegie Mellon University Original Image Scene Matches Output Image Figure 1: Given an input image, scene matching from a large
Automatic Generation of An Infinite Panorama Lisa H. Chan Alexei A. Efros Carnegie Mellon University Original Image Scene Matches Output Image Figure 1: Given an input image, scene matching from a large
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Understanding Faces. Detection, Recognition, and. Transformation of Faces 12/5/17
 Understanding Faces Detection, Recognition, and 12/5/17 Transformation of Faces Lucas by Chuck Close Chuck Close, self portrait Some slides from Amin Sadeghi, Lana Lazebnik, Silvio Savarese, Fei-Fei Li
Understanding Faces Detection, Recognition, and 12/5/17 Transformation of Faces Lucas by Chuck Close Chuck Close, self portrait Some slides from Amin Sadeghi, Lana Lazebnik, Silvio Savarese, Fei-Fei Li
Martian lava field, NASA, Wikipedia
 Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Visual words. Map high-dimensional descriptors to tokens/words by quantizing the feature space.
 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Large scale object/scene recognition
 Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs
 Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Computational Photography: Advanced Topics. Paul Debevec
 Computational Photography: Advanced Topics Paul Debevec Class: Computational Photography, Advanced Topics Module 1: 105 minutes Debevec,, Raskar and Tumblin 1:45: A.1 Introduction and Overview (Raskar,
Computational Photography: Advanced Topics Paul Debevec Class: Computational Photography, Advanced Topics Module 1: 105 minutes Debevec,, Raskar and Tumblin 1:45: A.1 Introduction and Overview (Raskar,
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Supervised Learning: Nearest Neighbors
 CS 2750: Machine Learning Supervised Learning: Nearest Neighbors Prof. Adriana Kovashka University of Pittsburgh February 1, 2016 Today: Supervised Learning Part I Basic formulation of the simplest classifier:
CS 2750: Machine Learning Supervised Learning: Nearest Neighbors Prof. Adriana Kovashka University of Pittsburgh February 1, 2016 Today: Supervised Learning Part I Basic formulation of the simplest classifier:
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
CS 558: Computer Vision 13 th Set of Notes
 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
Image Composition. COS 526 Princeton University
 Image Composition COS 526 Princeton University Modeled after lecture by Alexei Efros. Slides by Efros, Durand, Freeman, Hays, Fergus, Lazebnik, Agarwala, Shamir, and Perez. Image Composition Jurassic Park
Image Composition COS 526 Princeton University Modeled after lecture by Alexei Efros. Slides by Efros, Durand, Freeman, Hays, Fergus, Lazebnik, Agarwala, Shamir, and Perez. Image Composition Jurassic Park
3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry
 3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry Bryan C. Russell et al. SIGGRAPH Asia 2013 Presented by YoungBin Kim 2014. 01. 10 Abstract Produce annotated 3D
3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry Bryan C. Russell et al. SIGGRAPH Asia 2013 Presented by YoungBin Kim 2014. 01. 10 Abstract Produce annotated 3D
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Sparse 3D Model Reconstruction from photographs
 Sparse 3D Model Reconstruction from photographs Kanchalai Suveepattananont ksuvee@seas.upenn.edu Professor Norm Badler badler@seas.upenn.edu Advisor Aline Normoyle alinen@seas.upenn.edu Abstract Nowaday,
Sparse 3D Model Reconstruction from photographs Kanchalai Suveepattananont ksuvee@seas.upenn.edu Professor Norm Badler badler@seas.upenn.edu Advisor Aline Normoyle alinen@seas.upenn.edu Abstract Nowaday,
Texture. CS 419 Slides by Ali Farhadi
 Texture CS 419 Slides by Ali Farhadi What is a Texture? Texture Spectrum Steven Li, James Hays, Chenyu Wu, Vivek Kwatra, and Yanxi Liu, CVPR 06 Texture scandals!! Two crucial algorithmic points Nearest
Texture CS 419 Slides by Ali Farhadi What is a Texture? Texture Spectrum Steven Li, James Hays, Chenyu Wu, Vivek Kwatra, and Yanxi Liu, CVPR 06 Texture scandals!! Two crucial algorithmic points Nearest
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
A region-dependent image matching method for image and video annotation
 A region-dependent image matching method for image and video annotation Golnaz Abdollahian, Murat Birinci, Fernando Diaz-de-Maria, Moncef Gabbouj,EdwardJ.Delp Video and Image Processing Laboratory (VIPER
A region-dependent image matching method for image and video annotation Golnaz Abdollahian, Murat Birinci, Fernando Diaz-de-Maria, Moncef Gabbouj,EdwardJ.Delp Video and Image Processing Laboratory (VIPER
Context. CS 554 Computer Vision Pinar Duygulu Bilkent University. (Source:Antonio Torralba, James Hays)
") Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Compressed local descriptors for fast image and video search in large databases
 Compressed local descriptors for fast image and video search in large databases Matthijs Douze2 joint work with Hervé Jégou1, Cordelia Schmid2 and Patrick Pérez3 1: INRIA Rennes, TEXMEX team, France 2:
Compressed local descriptors for fast image and video search in large databases Matthijs Douze2 joint work with Hervé Jégou1, Cordelia Schmid2 and Patrick Pérez3 1: INRIA Rennes, TEXMEX team, France 2:
Image-based Lighting
 Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
Image-based Lighting 10/17/15 T2 Computational Photography Derek Hoiem, University of Illinois Many slides from Debevec, some from Efros Next week Derek away for ICCV (Venice) Zhizhong and Aditya will
3D reconstruction how accurate can it be?
 Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Storyline Reconstruction for Unordered Images
 Introduction: Storyline Reconstruction for Unordered Images Final Paper Sameedha Bairagi, Arpit Khandelwal, Venkatesh Raizaday Storyline reconstruction is a relatively new topic and has not been researched
Introduction: Storyline Reconstruction for Unordered Images Final Paper Sameedha Bairagi, Arpit Khandelwal, Venkatesh Raizaday Storyline reconstruction is a relatively new topic and has not been researched
What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today?
 Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Data driven 3D shape analysis and synthesis
 Data driven 3D shape analysis and synthesis Head Neck Torso Leg Tail Ear Evangelos Kalogerakis UMass Amherst 3D shapes for computer aided design Architecture Interior design 3D shapes for information visualization
Data driven 3D shape analysis and synthesis Head Neck Torso Leg Tail Ear Evangelos Kalogerakis UMass Amherst 3D shapes for computer aided design Architecture Interior design 3D shapes for information visualization
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Multiview Photogrammetry 3D Virtual Geology for everyone
 Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Location Recognition using Prioritized Feature Matching
 Location Recognition using Prioritized Feature Matching Yunpeng Li Noah Snavely Daniel P. Huttenlocher Department of Computer Science, Cornell University, Ithaca, NY 14853 {yuli,snavely,dph}@cs.cornell.edu
Location Recognition using Prioritized Feature Matching Yunpeng Li Noah Snavely Daniel P. Huttenlocher Department of Computer Science, Cornell University, Ithaca, NY 14853 {yuli,snavely,dph}@cs.cornell.edu
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Texture. Announcements. Markov Chains. Modeling Texture. Guest lecture next Tuesday. Evals at the end of class today
 Announcements Guest lecture next Tuesday Dan Goldman: CV in special effects held in Allen Center (room TBA) Evals at the end of class today Texture Today s Reading Alexei A. Efros and Thomas K. Leung,
Announcements Guest lecture next Tuesday Dan Goldman: CV in special effects held in Allen Center (room TBA) Evals at the end of class today Texture Today s Reading Alexei A. Efros and Thomas K. Leung,
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Schedule. Tuesday, May 10: Thursday, May 12: Motion microscopy, separating shading and paint min. student project presentations, projects due.
 Schedule Tuesday, May 10: Motion microscopy, separating shading and paint Thursday, May 12: 5-10 min. student project presentations, projects due. Computer vision for photography Bill Freeman Computer
Schedule Tuesday, May 10: Motion microscopy, separating shading and paint Thursday, May 12: 5-10 min. student project presentations, projects due. Computer vision for photography Bill Freeman Computer
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Large-scale Image Search and location recognition Geometric Min-Hashing. Jonathan Bidwell
 Large-scale Image Search and location recognition Geometric Min-Hashing Jonathan Bidwell Nov 3rd 2009 UNC Chapel Hill Large scale + Location Short story... Finding similar photos See: Microsoft PhotoSynth
Large-scale Image Search and location recognition Geometric Min-Hashing Jonathan Bidwell Nov 3rd 2009 UNC Chapel Hill Large scale + Location Short story... Finding similar photos See: Microsoft PhotoSynth
Anat Levin : Postdoctoral Associate, MIT CSAIL. Advisor: Prof William T. Freeman.
 Anat Levin MIT CSAIL The Stata Center 32-D466 32 Vassar Street, Cambridge MA 02139 Email: alevin@csail.mit.edu URL: http://people.csail.mit.edu/alevin Phone: 617-253-7245 Education: 2007-2008: Postdoctoral
Anat Levin MIT CSAIL The Stata Center 32-D466 32 Vassar Street, Cambridge MA 02139 Email: alevin@csail.mit.edu URL: http://people.csail.mit.edu/alevin Phone: 617-253-7245 Education: 2007-2008: Postdoctoral
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Evaluation of GIST descriptors for web-scale image search
 Evaluation of GIST descriptors for web-scale image search Matthijs Douze, Hervé Jégou, Sandhawalia Harsimrat, Laurent Amsaleg, Cordelia Schmid To cite this version: Matthijs Douze, Hervé Jégou, Sandhawalia
Evaluation of GIST descriptors for web-scale image search Matthijs Douze, Hervé Jégou, Sandhawalia Harsimrat, Laurent Amsaleg, Cordelia Schmid To cite this version: Matthijs Douze, Hervé Jégou, Sandhawalia
Visual Recognition and Search April 18, 2008 Joo Hyun Kim
 Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Image Blending and Compositing NASA
 Image Blending and Compositing NASA CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Image Compositing Compositing Procedure 1. Extract Sprites (e.g using Intelligent
Image Blending and Compositing NASA CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Image Compositing Compositing Procedure 1. Extract Sprites (e.g using Intelligent
Deep Learning for Visual Manipulation and Synthesis
 Deep Learning for Visual Manipulation and Synthesis Jun-Yan Zhu 朱俊彦 UC Berkeley 2017/01/11 @ VALSE What is visual manipulation? Image Editing Program input photo User Input result Desired output: stay
Deep Learning for Visual Manipulation and Synthesis Jun-Yan Zhu 朱俊彦 UC Berkeley 2017/01/11 @ VALSE What is visual manipulation? Image Editing Program input photo User Input result Desired output: stay
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Texture Synthesis. Darren Green (
 Texture Synthesis Darren Green (www.darrensworld.com) 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Texture Texture depicts spatially repeating patterns Many natural phenomena are textures
Texture Synthesis Darren Green (www.darrensworld.com) 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Texture Texture depicts spatially repeating patterns Many natural phenomena are textures
3D Editing System for Captured Real Scenes
 3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing Modeling
 Background COS526: Advanced Computer Graphics Tom Funkhouser Fall 2010 Image Processing o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing
Background COS526: Advanced Computer Graphics Tom Funkhouser Fall 2010 Image Processing o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Computer Vision, CS766. Staff. Instructor: Li Zhang TA: Jake Rosin
 Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
SkyFinder: Attribute-based Sky Image Search
 SkyFinder: Attribute-based Sky Image Search SIGGRAPH 2009 Litian Tao, Lu Yuan, Jian Sun Kim, Wook 2016. 1. 12 Abstract Interactive search system of over a half million sky images Automatically extracted
SkyFinder: Attribute-based Sky Image Search SIGGRAPH 2009 Litian Tao, Lu Yuan, Jian Sun Kim, Wook 2016. 1. 12 Abstract Interactive search system of over a half million sky images Automatically extracted