arxiv: v1 [cs.cv] 25 Oct 2017
|
|
|
- Eugenia Brown
- 5 years ago
- Views:
Transcription
1 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE 1 arxiv: v1 [cs.cv] 25 Oct 2017 Complete 3D Scene Parsing from Single RGBD Image Chuhang Zou Zhizhong Li Derek Hoiem Abstract Department of Computer Science University of Illinois at Urbana-Champaign USA Inferring the location, shape, and class of each object in a single image is an important task in computer vision. In this paper, we aim to predict the full 3D parse of both visible and occluded portions of the scene from one RGBD image. We parse the scene by modeling objects as detailed CAD models with class labels and layouts as 3D planes. Such an interpretation is useful for visual reasoning and robotics, but difficult to produce due to the high degree of occlusion and the diversity of object classes. We follow the recent approaches that retrieve shape candidates for each RGBD region proposal, transfer and align associated 3D models to compose a scene that is consistent with observations. We propose to use support inference to aid interpretation and propose a retrieval scheme that uses convolutional neural networks (CNNs) to classify regions and retrieve objects with similar shapes. We demonstrate the performance of our method compared with the state-of-the-art on our new NYUd v2 dataset annotations which are semi-automatically labelled with detailed 3D shapes for all the objects. 1 Introduction In this paper, we aim to predict the complete 3D models of indoor objects and layout surfaces from single RGBD images. The prediction is represented by detailed CAD objects with class labels and 3D planes of layouts. This interpretation is useful for robotics, graphics, and human activity interpretation, but difficult to produce due to the high degree of occlusion and the diversity of object classes. Our approach. We propose an approach to recover a 3D model of room layout and objects from an RGBD image. A major challenge is how to cope with the huge diversity of layouts and objects. Rather than restricting to a parametric model and a few detectable object classes, as in previous single-view reconstruction work, our models represent every layout surface and object with a 3D mesh that approximates the original depth image under projection. We take a data-driven approach that proposes a set of potential object regions, matches each region to a similar region in training images, and transfers and aligns the associated labeled 3D models while encouraging their agreement with observations. During the matching step, we use CNNs to retrieve objects of similar class and shape and further incorporate c The copyright of this document resides with its authors. It may be distributed unchanged freely in print or electronic forms.





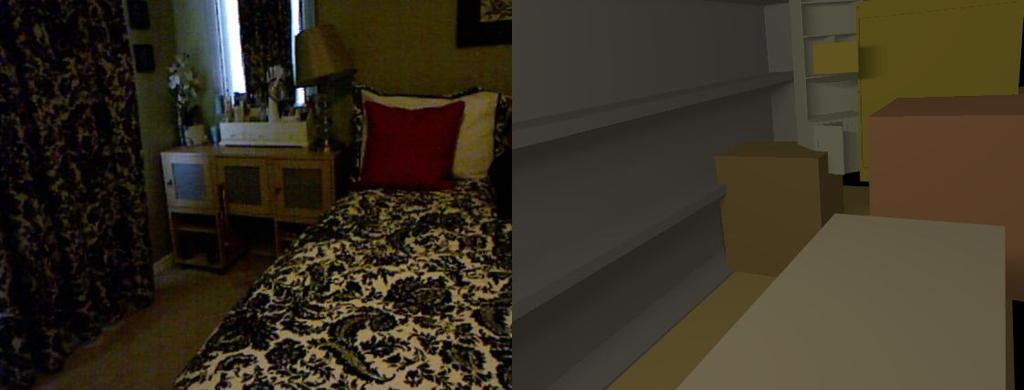
![We make use of the NYUd v2 dataset [18] which consists of 1449 indoor scene RGBD images, with each image segmented and labeled with object instances and categories.](/docs-images/89/99640500/images/2-7.jpg "Each segmented object also has a corresponding annotated 3D model, provided by Guo and Hoiem [4].")
2 2 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE Support CNNs Input RGB +Depth Region Proposals RGB&depth CNNs Feature extraction Classification CNNs Shape Retrieval CNNs... Shape Candidates Scene Composition Figure 1: Overview of our approach. Given one RGBD image, our approach is to perform complete 3D parsing. We generate layout proposals and object proposals, predict each proposal s support height and class and retrieve a similar object shape. We then select a subset of layout and object shapes to compose the scene with complete 3D interpretation. support estimation to aid interpretation. We hypothesize, and confirm in experiments, that support height information will help most for interpreting occluded objects because the full extent of an occluded object can be inferred from support height. The subset of proposed 3D objects and layouts that best represent the overall scene is then selected by our optimization method based on consistency with observed depth, coverage, and constraints on occupied space. The flexibility of our models is enabled through our approach (Fig. 1) to propose a large number of likely layout surfaces and objects and then compose a complete scene out of a subset of those proposals while accounting for occlusion, image appearance, depth, and layout consistency. Detailed 3D labeling. Our approach requires a dataset with labeled 3D shape for region matching, shape retrieval, and evaluation. We make use of the NYUd v2 dataset [18] which consists of 1449 indoor scene RGBD images, with each image segmented and labeled with object instances and categories. Each segmented object also has a corresponding annotated 3D model, provided by Guo and Hoiem [4]. The 3D labeling provides groundtruth 3D scene representation with layout surfaces as 3D planar regions, furniture as CAD exemplars, and other objects as coarser polygonal shapes. However, the polygonal shapes are too coarse to enable comparison of object shapes. Therefore, we extend the labeling by Guo and Hoiem with more detailed 3D annotations in the object scale. Annotations are labeled automatically and are adjusted manually as described in Sec. 3. We evaluate our method on our newly annotated groundtruth. We measure success according to accuracy of depth prediction of complete layout surfaces, voxel occupancy accuracy, and semantic segmentation performance. We evaluate our method on our newly annotated NYUd v2 dataset. Experiments on object retrieval demonstrate better region classification and shape estimation compared with the state-of-the-art. Our performance of scene composition shows better semantic segmentation results and competitive 3D estimation results compared with the state-of-the-art. Our contributions are: 1. We refine the NYUd v2 dataset with detailed 3D shape annotations for all the objects in each image. The labelling process is performed by a semi-automatic approach and can be utilized for labelling other RGBD scene datasets. 2. We apply support inference to aid region classification in images. 3. We use CNNs to classify regions and retrieve objects with similar shapes; 4. We demonstrate better performance in full 3D scene parsing from single RGBD images compared with the state-of-the-art.
3 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE 3 This paper is an extension of our previous work [5] (available only on arxiv) that predicts full 3D scene parsing from an RGBD image. Our main new contributions are refinement of the NYUd v2 dataset with detailed 3D shape annotations, use of CNNs to classify regions and retrieve object models with similar shapes to a region, and use of support inference to aid region classification. We also provide more detailed discussion and conduct more extensive experiments, demonstrating qualitative and quantitative improvement. 2 Related work The most relavent work to our paper is Guo et al [5] which predicts the complete 3D models of indoor scene from single RGBD image as introduced above. Both our approach and Guo et al. recover complete models from a limited viewpoint, which is in contrast to the multiview whole-room 3D context interpretation method by Zhang et al. [24] that advocate making use of 360 full-view panoramas. We introduce other related topics as follows. Inferring shape from single RGB (D) Image. Within RGB images, Lim et al. [12, 13] find furniture instances and Aubry et al. [1] recognize chairs using HOG-based part detectors. In RGBD images, Song and Xiao [19] search for main furniture by sliding 3D shapes and enumerating all possible poses. Similarly, Gupta et al. [8] fit shape models of 6 classes with poses to improve object detection. Our approach finds an approximate shape for any object and layout in the scene. We take an exemplar-based approach, apply region-to-region retrieval to transfer similar 3D shape from training region to query region. Semantic segmentation for single RGBD Images. Silberman et al. [18] use both image and depth cues to jointly segment the objects into 4 categories and infer support relations. Gupta et al. [6] apply both generic and class-specific features to assign 40-class region labels. Their following work encodes both RGB and depth descriptor (HHA) [7]: height above ground, angle with gravity and the horizontal disparity into the CNNs structure for better region classification. Long et al. [15] introduce a fully convolutional network structure for learning better features. Our method make use of the RGB and HHA features to categorize objects into a larger variety of 81 classes to distinguish infrequent objects in the scenes, rather than restricting to a parametric model and a few detectable objects. Though semantic segmentation is not the main purpose of our method, we can infer region labels by projecting the 3D scene models to the 2D images. Support height estimation. Guo and Hoiem [4] localize the height and full extent of support surfaces from one RGBD image. In addition, object height priors have shown to be crucial geometric cues for better object detection in both 2D [10, 21] and 3D [8, 14, 19]. Deng et al. [3] applies height above ground to distinguish objects. We propose to use object s support height to aid region class interpretation, which helps in classification of occluded regions by distinguishing objects that appear at different height levels: e.g. chair should be on the floor and alarm clock should be on the table. 3 Detailed 3D annotations for indoor scenes We conduct our experiments on the NYUdv2 dataset [18], which provides complete 3D labeling of both objects and layouts of 1449 RGB-D indoor images. Each object and layout has a 2D segment labeling and a corresponding annotated 3D model, provided by Guo and Hoiem [4]. The 3D annotations use 30 models to represent 6 categories of furniture
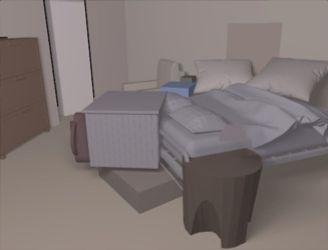
 Annotations by Guo and Hoiem Our detailed annotations Figure 2:")
 image, 3D annotations by Guo")
![and Hoiem [4], our refined 3D annotations.](/docs-images/89/99640500/images/4-2.jpg "Our annotations of the scene is much detailed in object shape scale.")


![polygons with CAD models collected from ShapeNet [2] and ModelNet [22].](/docs-images/89/99640500/images/4-5.jpg "To align name-space between datasets, we manually map all model class")











 = C depth j r i s(m i,t i ) I d ( j) d( ˆ")
4 4 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE Input RGB (D) Annotations by Guo and Hoiem Our detailed annotations Figure 2: Samples of our semi-automatic 3D object annotations in NYUd v2 dataset. Images from first to third row: input RGB (D) image, 3D annotations by Guo and Hoiem [4], our refined 3D annotations. Our annotations of the scene is much detailed in object shape scale. that are most common and use extruded polygons to label all other objects. These models provide a good approximation of object extent but are often poor representations of object shape, as shown in Fig 2. Therefore, we extend the NYUd v2 dataset by replacing the extruded polygons with CAD models collected from ShapeNet [2] and ModelNet [22]. To align name-space between datasets, we manually map all model class labels to the 633-class 3D object labels in NYUd v2 dataset. The shape retrieval and alignment process is performed automatically and then adjusted manually, as follows. Coarse alignment. For each groundtruth 2D region r i in the NYUd v2 dataset, we retrieve model set M = {M i } from our collected models that have the same class label as r i. We also include the region s original coarse 3D annotation by Guo and Hoiem [4] in the model set M, so that we can preserve the original labeling if no provided CAD models are better fit in depth. We initialize each M i s 3D location as the world coordinate center of the 3D annotation labeled by Guo and Hoiem. We resize M i to have the same height as the 3D annotation. Fine alignment. Next, we align each retrieved 3D object model M i to fit the available depth map of the corresponding 2D region r i in the target scene. The initial alignment is often not in the correct scale and orientation; e.g., a region of a left-facing chair often resembles a right-facing chair and needs to be rotated. We found that using Iterative Closest Point to solve for all parameters did not yield good results. Instead, we enumerate 16 equally-spaced orientations from -180 to 180 from top-down view and allows 2 minor scale revision ratio as {1.0, 0.9}. We perform ICP to solve for translation initialized using scale and rotation, and pick the best ICP result based on the following cost function: FittingCost(M i,t i ) = C depth j r i s(m i,t i ) I d ( j) d( ˆ j;m i,t i ) + j r i s(m i,t i ) C missing +C occ max( d( ˆ j;m i,t i ) I d ( j),0) (1) j r i s(m i,t i ) where T i represents scale, rotation, and translation, s(.) is the mask of the rendered aligned object, I d ( j) denotes the observed depth at pixel j and d( ˆ j) means the rendered depth at j. The first term encourages depth similarity to the groundtruth RGBD region; the second
. Based on the fitting cost of Eq.")
5 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE 5 penalizes pixels in the proposed region that are not rendered, and the third term penalizes pixels in the rendered model that are closer than the observed depth image (so the model does not stick out into space known to be empty). Based on the fitting cost of Eq. 1, our algorithm picks the model M i with the best translation, orientation, and scale T i. We set the term weights C depth, C missing, C occ as 1.0,0.9,0.5 based on a grid search in the validation set. For efficiency, we first obtain the top 5 models based on the fitting cost, each maximized only over the 16 initial orientations before ICP. For each of these models, we then solve for the best translation T i for each scale and rotation based on Eq. 1 and finally select the aligned model with the lowest fitting cost. Post-processing. Automatic fitting may fail due to high occlusion or missing depth values. We manually conduct a post-processing check and refine badfitting models, which affects roughly 10% of models. Using a GUI, an annotator checks the automatically produced shape for each region. If the result is not satisfactory, the user compares to other top model fits, and if none of those are good matches, then the fitting optimization based on Eq. 1 is applied to the original polygonal 3D labeling. This helps to ensure that our detailed shape annotations are a strict improvement over the original course annotations. Validation. Figure 3 reports the cumulative relative error of the rendered depth of our detailed 3D annotations compared with groundtruth depth in NYUd v2 dataset. The relative error r D is computed as: Figure 3: Cumulative relative depth error of our detailed 3D annotations and the 3D annotations by Guo and Hoiem [4] in NYUd v2 dataset. r D = 1 S I I S I p I d p ˆ d p d p (2) where S I = {I 1,I 2,...,I N } is all the RGBD images in the dataset; p represents a pixel in each image I; d p is the groundtruth depth of pixel p from sensor; and dˆ p is the rendered depth of the 3D label annotation at pixel p. For comparison, we report the r D of the 3D annotations by Guo and Hoiem [4]. Our annotations have more points with low relative depth error, and achieve a better modeling of depth for each image. 4 Generating object candidates Given an RGBD image as input, we aim to find a set of layout and object models that fit RGB and depth observations and provide a likely explanation for the unobserved portion of the scene. To produce object candidate regions, we use the method for RGBD images by Gupta et al. [7] and extract top ranked 2000 region proposals for each image. Our experiments show that this region retrieval is more effective than the method based on Prims algorithm [16] used in our previous work [5]. Likely object categories and 3D shapes are then assigned to each candidate region.




![We first find candidate support heights using the method of Guo and Hoiem [4] and use a CNN to estimate which is most likely for a given object region based on crops of the depth maps and height maps](/docs-images/89/99640500/images/6-5.jpg "of the region proposal and region that extends from bottom of the region proposal to the estimated floor position.")

6 6 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE Proposed height Region proposal depth Support from below height stack Floor height depth height Region Proposal s Bottom to Floor Height Conv 3 3, 8 filters, stride 1 Max Pool Max Pool Conv 3 3, 3 3, 3 3, stride 2 16 filters, stride 2 stride 1 FC 512 FC 512 FC 2 Figure 4: The CNN for predicting a candidate object s support height. We perform ReLU between the convolutional layer and the max pooling layer. Local response normalization is performed before the first fully connected (FC) layer. We add dropout with 0.5 before each FC layer during training. 4.1 Predicting region s support height and class We train and use CNN networks to predict the object category and support height of each region, as shown in Fig. 4 and Fig. 5. The support height is used as a feature for the object classification. We also train and use a CNN with a Siamese network design to find the most similar 3D shape of a training object, based on region and depth features. Support height prediction. We predict support height for each object with the aim of better predicting class and position. We first find candidate support heights using the method of Guo and Hoiem [4] and use a CNN to estimate which is most likely for a given object region based on crops of the depth maps and height maps of the region proposal and region that extends from bottom of the region proposal to the estimated floor position. The support height network also predicts whether the object is supported from below or behind. To create the feature vector, we subtract the candidate support height from the height cropped images, re-size all four crops to patches, and concatenate them, as illustrated in Fig. 4. In the test set, we identify the closest candidate support height with 92% ac0.96/1.0 (shape similarity) curacy, with an average distance error of bed cosine 0.18m. As a feature for classification, we softmax use the support height relative to the camera FC 512 FC 82 height, which leads to slightly better perforfc 1024 FC 1024 mance than using support height relative to the estimated ground likely because dataset images are taken from consistent heights but estimated ground height may be mistaken. Categorization. Our classification netregion Proposal RGBD Exemplar RGBD work gets input of the region proposal s support height and type, along with CNN features from both RGB and depth. The Figure 5: The CNNs for region classification network predicts the probability for each (left) and similar shape retrieval (right). We class as shown in Fig. 5. To model the var- perform ReLU and dropout with 0.5 after the ious classes of shapes in indoor scene, we first FC layer for both of the networks during classify the regions into the 78 most com- training. mon classes, which have at least 10 training Support CNNs RGB CNNs Depth CNNs RGB CNNs Depth CNNs
7 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE 7 samples. Less common objects are classified as other prop", other furniture" and other structure" based on rules by Silberman et al. [18]. In addition, we identify a region proposal that is not representative for an object shape (e.g. a piece of chair leg region when the whole chair region is visible) as a bad region" class. This leads to our = 82-class classifier. The input support height and type are directly predicted by our support height prediction network. To create our classification features, we copy the two predicted support values 100 times each (a useful trick to reduce sensitivity to local optima for important low-dimensional features) and concatenate them to the region proposal s RGB and HHA features from Gupta et al. [7] in both the 2D bounding box and masked region as in [9]. Experiments show that using the predicted support type and the support height improves the classification accuracy by about 1%, with larger improvement for occluded objects. 4.2 Predicting region s 3D shape Using a Siamese network (Fig. 5), we learn a region-to-region similarity measure that predicts 3D shape similarity of the corresponding objects. The network embeds the RGB and HHA features used in our classification network into a space where cosine distance correlates to shape similarity, as in [23]. In training, we use surface-to-surface distance [17] between mesh pairs as the ground truth similarity and train the network to penalize errors in shape similarity orderings. Each region pair s shape similarity score is compared with the next pair s among the randomly sampled batch in the current epoch and penalized only if the ordering disagrees with the groundtruth similarity. We attempted sharing embedding weights with the classification network but observed a 1% drop in classification performance. We also found predicted class probability to be unhelpful for predicting shape similarity. Candidate region selection. We apply the above retrieval scheme to each of the 2000 region proposals in each image, obtaining shape similarity rank compared with all the training samples and 81-object class and non-object class probability for each region proposal. In order to reduce the number of retrieved candidates before the scene interpretation in Sec. 5, we first reduce the number of region proposals using non-maximal suppression based on non-object class probability and threshold on the non-object class probability. We set the threshold to obtain 190 region proposals for each image, on average. We select the two most probable classes for each remaining region proposal and select five most similar shapes for each class, leading to 10 shape candidates for each region proposal. Then, we further refine these 10 retrieved shapes. We align each shape candidate to the target scene by translating the model using the offset between the depth point mass centers of the region proposal and the retrieved region. We then perform ICP, using a grid of initial values for rotation and scale and pick the best one for each shape based on the fitting energy in Eq. 1. We set the term weight: C missing as 0.6, C depth as 1.0, C occ as 0.9 based on a grid search on the validation set. We tried using the estimated support height for each region proposal for aligning the related 3D shape models but observed a worse performance in the scene composition result. This is because a relatively small error in object s support height estimation can cause a larger error in fitting. Finally, we select the two most promising shape candidates based on the following energy function, E l (m i ) =w f E f itting (m i,t i ) + w c logp(c i r i ) + w b logp(b i r i ) (3)
8 8 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE E f itting is the fitting energy defined in Eq. 1 that we used for alignment. P(c i r i ) and P(b i r i ) are the softmax class probability and the non-object class probability output by our classification network for the regon proposal r i. We normalize P(c i r i ) to sum to 1, in order not to penalize the non-object class twice in the energy function. We set the term weights w f = 1.0, w c = 1500, w b = 1300 using a grid search. Note that E f itting is on the scale of the number of pixels in the region. 4.3 Training details We first find meta-parameters on the validation set after training classifiers on the training set. Then, we retrain on both training and validation in order to report results on the test set. We train our networks with the region proposals that have the highest (and at least 0.5) 2D intersection-over-union (IoU) with each groundtruth region in the train set. We train the support height prediction network with the groundtruth support type for the region proposal and set the groundtruth support height as the closest support height candidate that is within 0.15 meters from the related 3D annotation s bottom. For training regions that are supported from behind, we do not penalize the support height estimation, since our support height candidates are for vertical support. For training the classification network, we also include the non-object class region proposals that have < 0.3 IoU with the groundtruth regions. We randomly sample the same number of the non-object regions as the total number of the object regions during training. To avoid unbalanced weights for different classes, we sample from the dataset the same number of training regions for each class in each epoch. When training the shape similarity network, we translate each 3D model to origin and resize to voxel cuboid before computing the surface-to-surface distance. We use ADAM [11] to train each network with the hyper-parameter of β 1 = 0.9, β 2 = The learning rate for each network is: support height prediction , classification and Siamese network Scene composition with candidate 3D shape Given a set of retrieved candidate 3D shapes and the layout candidates from Guo et al. [5], we select a subset of the candidates that closely reproduce the original depth image when rendered, correspond to minimally overlapping 3D aligned models. The composition is hard because of the high degree of occlusions and large amount of objects in the scene. We apply the same method proposed by Guo et al. [5] to perform scene composition, this leads to our final scene interpretation. 6 Experiments 6.1 Experiments setting We evaluate our method on our detailed 3D annotated NYUd v2 dataset. We also report the result of the state-of-the-art by Guo et al. [5] on our new annotations. Same as Gupta et al. [7], we tune the parameters on the validation set while training on the train set; we report our result on the test set by training on both the train and validation set.
9 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE 9 Table 1: Our 81-class classification accuracy on groundtruth 2D regions in the test set. We compare two methods: our classification network with/without estimating support height. We compute the average accuracy for each class, average precision based on the predicted probability and the accuracy averaged over instances. The classification networks are trained and evaluated 10 times and the means and standard deviations (reflecting variation due to randomness in learning) are reported. 15 common object class results are also listed. Bold numbers signify better performance. Method avg per class avg precision avg over instance picture chair cabinet pillow bottle books paper table box window door sofa bag lamp clothes w/o support height 43.7± ± ± w/ support height 44.7± ± ± Table 3: Quantitative evaluation for our retrieval method compared with Guo et al s method. Method avg class accuracy (%) avg 3D IoU avg surface distance (m) top 1 top 2 top 3 top 1 top 2 top 3 top 1 top 2 top 3 Guo et al. [5] Ours Evaluation of region classification and shape retrieval Classification. We report the region classification accuracy on the groundtruth 2D regions in the test set by our classification network, as shown in Table 1. Overall, including support height prediction will improve the classification results. For certain classes, objects often appear on the floor level (e.g. chair, desk) will have better classification accuracy given Table 2: Classification accuracy under different occlusion ratios of groundtruth regions in test set Occlusion Ratio < 0.5 > 0.5 w/ support height w/o support height object s height, while objects often appear on several heights (e.g. picture) do not have this benefit. Table. 2 shows the per instance classification accuracy under different occlusion ratios of the groundtruth regions in the test set. The improvement in classification accuracy is larger for highly occluded area, which conforms with our claim that estimating object s support height will help classify occluded regions. Retrieval. We evaluate our candidate shape retrieval method compared with the stateof-the-art by Guo et al. [5] given groundtruth 2D regions in the dataset, as shown in Table 3. Since we use groundtuth regions, we do not perform candidate selection in Sec. 4.2 for this evaluation. We evaluate 1) top N retrieved class accuracy and 2) top N retrieved shape similarity, based on the shape intersect over union (IoU) and the surface-to-surface distance. In our experiment, we set N = {1,2,3}. To avoid rotation ambiguity in shape similarity measurement, we rotate each retrieved object to find the best shape similarity score with the groundtruth 3D shape. Our retrieval method outperforms the state-of-the-art under all the evaluation criteria. 6.3 Evaluation of scene composition 84-class semantic segmentation. We evaluate the 84-class semantic segmentation (81 object classes and 3 layout classes: wall, ceiling, floor) on the rendered 2D image of our scene composition result. We compare our method with Guo et al. [5] with both automatically generated region proposals and groundtruth regions. Table 4 shows the average class accuracy (avacc), average class accuracy weighted by frequency (fwavacc) and the average pixel ac-
10 10 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE Table 4: Results of 84-class semantic segmentation on both automatic region proposals and groundtruth regions. Method (a) Overall results Mean coverage Mean coverage weighted unweighted Guo et al. [5] MCG+CCA Ours w/o support Ours Ours w/ GT support Ours w/ GT-region Detailed groundtruth labeling (b) Each class s w/ support accuracy minus w/o support accuracy with automatic region proposals Table 5: Results of 84-class instance segmentation on both automatic region proposals and groundtruth regions. Method Mean coverage Mean coverage weighted unweighted Guo et al. [5] MCG+CCA Ours w/o support Ours Ours w/ GT support Ours w/ GT-region Detailed groundtruth labeling curacy (pixacc). Our method has a better semantic segmentation result. We report our result with/without support height prediction and the result given the groundtruth support height as the upper bound. We see improvements, compared to Guo et al., due to both classification method (CNN vs. CCA) and region proposal method (MCG by Gupta et al. vs. prim s by Guo et al.). We also report the 40-class semantic segmentation compared with the state-ofthe-art [15]: 47.7 pixacc / 18.3 avacc / 33.8 fwavacc vs. their 65.4/34.0/49.5. Note that our method focuses on predicting 3D geometry rather than semantic segmentation. 84-class instance segmentation. We report the instance segmentation result with the experiment setting same as semantic segmentation. The evaluation follows the protocol in RMRC [20]. Our method outperforms the state-of-the-art slightly. Note that the lower results for MeanCovU is caused by the large diversity of classes with less frequency. 3D estimation. We evaluate 3D estimation as in Guo et al. [5] with layout pixel-wise and depth prediction and freespace and occupancy estimation. As shown in Fig. 6, our method has competitive results in 3D estimation compared with the state-of-the-art. Qualitative results. Sample qualitative results are shown in Fig. 6 and Fig. 7. Our method has better region classification and shape estimation property, which results in a slightly better scene composition result. Failure cases are caused by bad pruning in region proposals (last two column, Fig. 6) and confusion between similar class (top right, Fig. 7). 7 Conclusions In this paper, we predict the full 3D parse of both visible and occluded portions of the scene from one RGBD image. We propose to use support inference to aid interpretation and pro- Method Table 6: Results of 3D layout, freespace and occupancy estimation. Layout Pixel Error Layout Depth Error Freespace Occupancy overall visible occluded overall visible occluded precision recall precision recall precision-ε recall-ε Guo et al. [5] Ours





 GT")









































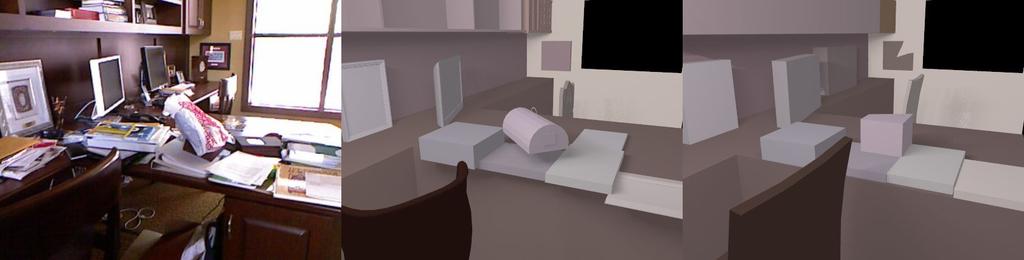
11 11 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE Input RGB(D) GT Guo et al. Ours Input RGB(D) GT Guo et al. Ours Figure 6: Qualitative results on scene composition with automatic region proposals. We randomly sample images from the top 25% (first four rows), medium 50% (row 6-9) and worst 25% (last four rows) based on 84-class semantic segmentation accuracy.

 GT Guo et al.")


,")
 based on")

















12 12 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE Input RGB(D) GT Guo et al. Ours Input RGB(D) GT Guo et al. Ours Figure 7: Qualitative results on scene composition given groundtruth 2D labeling as region proposals. We randomly sample images from the top 25% (first two rows), medium 50% (row 3-4) and worst 25% (last two rows) based on 84-class semantic segmentation accuracy. pose a retrieval scheme that uses CNNs to classify regions and find objects with similar shapes. Experiments demonstrate better performance of our method in semantic segmentation and instance segmentation and competitive results in 3D scene estimation. Acknowledgements This research is supported in part by ONR MURI grant N and ONR MURI grant N We thank David Forsyth for insightful comments and discussion. References [1] M. Aubry, D. Maturana, A. A. Efros, B. C. Russell, and J. Sivic. Seeing 3d chairs: Exemplar part-based 2d-3d alignment using a large dataset of cad models. In CVPR, [2] Angel X. Chang, Thomas Funkhouser, Leonidas Guibas, Pat Hanrahan, Qixing Huang, Zimo Li, Silvio Savarese, Manolis Savva, Shuran Song, Hao Su, Jianxiong Xiao, Li Yi, and Fisher Yu. ShapeNet: An Information-Rich 3D Model Repository. Technical Report arxiv: [cs.gr], Stanford University Princeton University Toyota Technological Institute at Chicago, [3] Zhuo Deng, Sinisa Todorovic, and Longin Jan Latecki. Semantic segmentation of rgbd images with mutex constraints. In Proceedings of the IEEE International Conference on Computer Vision, pages , 2015.
13 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE 13 [4] Ruiqi Guo and Derek Hoiem. Support surface prediction in indoor scenes. In ICCV, [5] Ruiqi Guo, Chuhang Zou, and Derek Hoiem. Predicting complete 3d models of indoor scenes. arxiv preprint arxiv: , [6] Saurabh Gupta, Pablo Arbelaez, and Jitendra Malik. Perceptual organization and recognition of indoor scenes from RGB-D images. In CVPR, [7] Saurabh Gupta, Ross Girshick, Pablo Arbeláez, and Jitendra Malik. Learning rich features from rgb-d images for object detection and segmentation. In European Conference on Computer Vision, pages Springer, [8] Saurabh Gupta, Pablo Arbeláez, Ross Girshick, and Jitendra Malik. Aligning 3d models to rgb-d images of cluttered scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [9] Bharath Hariharan, Pablo Arbeláez, Ross Girshick, and Jitendra Malik. Simultaneous detection and segmentation. In Computer vision ECCV 2014, pages Springer, [10] Derek Hoiem, Alexei A Efros, and Martial Hebert. Putting objects in perspective. International Journal of Computer Vision, 80(1):3 15, [11] Diederik Kingma and Jimmy Ba. Adam: A method for stochastic optimization. arxiv preprint arxiv: , [12] Joseph J Lim, Hamed Pirsiavash, and Antonio Torralba. Parsing IKEA objects: Fine pose estimation. In ICCV, [13] Joseph J Lim, Aditya Khosla, and Antonio Torralba. Fpm: Fine pose parts-based model with 3d cad models. In European Conference on Computer Vision, pages Springer, [14] Dahua Lin, Sanja Fidler, and Raquel Urtasun. Holistic scene understanding for 3d object detection with rgbd cameras. In ICCV, [15] Jonathan Long, Evan Shelhamer, and Trevor Darrell. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [16] Santiago Manen, Matthieu Guillaumin, and Luc Van Gool. Prime object proposals with randomized prim s algorithm. In Proceedings of the IEEE International Conference on Computer Vision, pages , [17] Jason Rock, Tanmay Gupta, Justin Thorsen, JunYoung Gwak, Daeyun Shin, and Derek Hoiem. Completing 3d object shape from one depth image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [18] Nathan Silberman, Derek Hoiem, Pushmeet Kohli, and Rob Fergus. Indoor segmentation and support inference from rgbd images. Computer Vision ECCV 2012, pages , 2012.
14 14 ZOU, LI, HOIEM: COMPLETE 3D SCENE PARSING FROM SINGLE RGBD IMAGE [19] Shuran Song and Jianxiong Xiao. Sliding shapes for 3d object detection in depth images. In European conference on computer vision, pages Springer, [20] R Urtasun, R Fergus, D Hoiem, A Torralba, A Geiger, P Lenz, N Silberman, J Xiao, and S Fidler. Reconstruction meets recognition challenge, [21] Stefan Walk, Konrad Schindler, and Bernt Schiele. Disparity statistics for pedestrian detection: Combining appearance, motion and stereo. In Computer Vision ECCV 2010, pages Springer, [22] Zhirong Wu, Shuran Song, Aditya Khosla, Fisher Yu, Linguang Zhang, Xiaoou Tang, and Jianxiong Xiao. 3d shapenets: A deep representation for volumetric shapes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [23] Wen-tau Yih, Kristina Toutanova, John C Platt, and Christopher Meek. Learning discriminative projections for text similarity measures. In Proceedings of the Fifteenth Conference on Computational Natural Language Learning, pages Association for Computational Linguistics, [24] Yinda Zhang, Shuran Song, Ping Tan, and Jianxiong Xiao. Panocontext: A wholeroom 3d context model for panoramic scene understanding. In European Conference on Computer Vision, pages Springer, 2014.
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Support surfaces prediction for indoor scene understanding
 2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
arxiv: v3 [cs.cv] 18 Aug 2017
![arxiv: v3 [cs.cv] 18 Aug 2017](/thumbs/73/69392953.jpg "arxiv: v3 [cs.cv] 18 Aug 2017") Predicting Complete 3D Models of Indoor Scenes Ruiqi Guo UIUC, Google Chuhang Zou UIUC Derek Hoiem UIUC arxiv:1504.02437v3 [cs.cv] 18 Aug 2017 Abstract One major goal of vision is to infer physical models
Predicting Complete 3D Models of Indoor Scenes Ruiqi Guo UIUC, Google Chuhang Zou UIUC Derek Hoiem UIUC arxiv:1504.02437v3 [cs.cv] 18 Aug 2017 Abstract One major goal of vision is to infer physical models
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
3D Scene Understanding from RGB-D Images. Thomas Funkhouser
 3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
3D Scene Understanding from RGB-D Images Thomas Funkhouser Recent Ph.D. Student Current Postdocs Current Ph.D. Students Disclaimer: I am talking about the work of these people Shuran Song Yinda Zhang Andy
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today?
 Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
Introduction What are we trying to achieve? Why are we doing this? What do we learn from past history? What will we talk about today? What are we trying to achieve? Example from Scott Satkin 3D interpretation
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY
 MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
FPM: Fine Pose Parts-Based Model with 3D CAD Models
 FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
FPM: Fine Pose Parts-Based Model with 3D CAD Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
arxiv: v1 [cs.cv] 3 Jul 2016
![arxiv: v1 [cs.cv] 3 Jul 2016](/thumbs/95/123101257.jpg "arxiv: v1 [cs.cv] 3 Jul 2016") A Coarse-to-Fine Indoor Layout Estimation (CFILE) Method Yuzhuo Ren, Chen Chen, Shangwen Li, and C.-C. Jay Kuo arxiv:1607.00598v1 [cs.cv] 3 Jul 2016 Abstract. The task of estimating the spatial layout
A Coarse-to-Fine Indoor Layout Estimation (CFILE) Method Yuzhuo Ren, Chen Chen, Shangwen Li, and C.-C. Jay Kuo arxiv:1607.00598v1 [cs.cv] 3 Jul 2016 Abstract. The task of estimating the spatial layout
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
CS 558: Computer Vision 13 th Set of Notes
 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
CHESS RECOGNITION FROM A SINGLE DEPTH IMAGE
 CHESS RECOGNITION FROM A SINGLE DEPTH IMAGE Yu-An Wei, Tzu-Wei Huang, Hwann-Tzong Chen National Tsing Hua University, Taiwan JenChi Liu Industrial Technology Research Institute ABSTRACT This paper presents
CHESS RECOGNITION FROM A SINGLE DEPTH IMAGE Yu-An Wei, Tzu-Wei Huang, Hwann-Tzong Chen National Tsing Hua University, Taiwan JenChi Liu Industrial Technology Research Institute ABSTRACT This paper presents
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
arxiv: v1 [cs.cv] 23 Mar 2018
![arxiv: v1 [cs.cv] 23 Mar 2018](/thumbs/80/81847201.jpg "arxiv: v1 [cs.cv] 23 Mar 2018") LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image Chuhang Zou Alex Colburn Qi Shan Derek Hoiem University of Illinois at Urbana-Champaign Zillow Group {czou4, dhoiem}@illinois.edu {alexco,
LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image Chuhang Zou Alex Colburn Qi Shan Derek Hoiem University of Illinois at Urbana-Champaign Zillow Group {czou4, dhoiem}@illinois.edu {alexco,
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Spontaneously Emerging Object Part Segmentation
 Spontaneously Emerging Object Part Segmentation Yijie Wang Machine Learning Department Carnegie Mellon University yijiewang@cmu.edu Katerina Fragkiadaki Machine Learning Department Carnegie Mellon University
Spontaneously Emerging Object Part Segmentation Yijie Wang Machine Learning Department Carnegie Mellon University yijiewang@cmu.edu Katerina Fragkiadaki Machine Learning Department Carnegie Mellon University
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding
 PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding Yinda Zhang Shuran Song Ping Tan Jianxiong Xiao Princeton University Simon Fraser University Alicia Clark PanoContext October
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding Yinda Zhang Shuran Song Ping Tan Jianxiong Xiao Princeton University Simon Fraser University Alicia Clark PanoContext October
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
3D Spatial Layout Propagation in a Video Sequence
 3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
Depth Estimation from a Single Image Using a Deep Neural Network Milestone Report
 Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Visual localization using global visual features and vanishing points
 Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
3D Object Detection with Latent Support Surfaces
 3D Object Detection with Latent Support Surfaces Zhile Ren Brown University ren@cs.brown.edu Erik B. Sudderth University of California, Irvine sudderth@uci.edu Abstract We develop a 3D object detection
3D Object Detection with Latent Support Surfaces Zhile Ren Brown University ren@cs.brown.edu Erik B. Sudderth University of California, Irvine sudderth@uci.edu Abstract We develop a 3D object detection
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Multi-Scale Convolutional Architecture for Semantic Segmentation
 Multi-Scale Convolutional Architecture for Semantic Segmentation Aman Raj, Daniel Maturana, Sebastian Scherer CMU-RI-TR-15-21 September 2015 Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania
Multi-Scale Convolutional Architecture for Semantic Segmentation Aman Raj, Daniel Maturana, Sebastian Scherer CMU-RI-TR-15-21 September 2015 Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Can Similar Scenes help Surface Layout Estimation?
 Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding
 DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding Yinda Zhang Mingru Bai Pushmeet Kohli 2,5 Shahram Izadi 3,5 Jianxiong Xiao,4 Princeton University 2 DeepMind 3 PerceptiveIO
DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding Yinda Zhang Mingru Bai Pushmeet Kohli 2,5 Shahram Izadi 3,5 Jianxiong Xiao,4 Princeton University 2 DeepMind 3 PerceptiveIO
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Revisiting 3D Geometric Models for Accurate Object Shape and Pose
 Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
Revisiting 3D Geometric Models for Accurate Object Shape and Pose M. 1 Michael Stark 2,3 Bernt Schiele 3 Konrad Schindler 1 1 Photogrammetry and Remote Sensing Laboratory Swiss Federal Institute of Technology
DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding
 DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding Yinda Zhang Mingru Bai Pushmeet Kohli 2,5 Shahram Izadi 3,5 Jianxiong Xiao,4 Princeton University 2 DeepMind 3 PerceptiveIO
DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding Yinda Zhang Mingru Bai Pushmeet Kohli 2,5 Shahram Izadi 3,5 Jianxiong Xiao,4 Princeton University 2 DeepMind 3 PerceptiveIO
Cross-domain Deep Encoding for 3D Voxels and 2D Images
 Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
arxiv: v2 [cs.cv] 24 Apr 2017
![arxiv: v2 [cs.cv] 24 Apr 2017](/thumbs/74/71202274.jpg "arxiv: v2 [cs.cv] 24 Apr 2017") IM2CAD Hamid Izadinia University of Washington Qi Shan Zillow Group Steven M. Seitz University of Washington arxiv:1608.05137v2 [cs.cv] 24 Apr 2017 Figure 1: IM2CAD takes a single photo of a real scene
IM2CAD Hamid Izadinia University of Washington Qi Shan Zillow Group Steven M. Seitz University of Washington arxiv:1608.05137v2 [cs.cv] 24 Apr 2017 Figure 1: IM2CAD takes a single photo of a real scene
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
arxiv: v1 [cs.cv] 2 Sep 2018
![arxiv: v1 [cs.cv] 2 Sep 2018](/thumbs/85/92128474.jpg "arxiv: v1 [cs.cv] 2 Sep 2018") Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
arxiv: v1 [cs.cv] 7 Nov 2015
![arxiv: v1 [cs.cv] 7 Nov 2015](/thumbs/88/116773222.jpg "arxiv: v1 [cs.cv] 7 Nov 2015") Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images Shuran Song Jianxiong Xiao Princeton University http://dss.cs.princeton.edu arxiv:1511.23v1 [cs.cv] 7 Nov 215 Abstract We focus on the
Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images Shuran Song Jianxiong Xiao Princeton University http://dss.cs.princeton.edu arxiv:1511.23v1 [cs.cv] 7 Nov 215 Abstract We focus on the
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models
 Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation
 AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
AdaDepth: Unsupervised Content Congruent Adaptation for Depth Estimation Introduction Supplementary material In the supplementary material, we present additional qualitative results of the proposed AdaDepth
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Marr Revisited: 2D-3D Alignment via Surface Normal Prediction
 Marr Revisited: 2D-3D Alignment via Surface Normal Prediction Aayush Bansal 1 Bryan Russell 2 Abhinav Gupta 1 1 Carnegie Mellon University 2 Adobe Research http://www.cs.cmu.edu/ aayushb/marrrevisited/
Marr Revisited: 2D-3D Alignment via Surface Normal Prediction Aayush Bansal 1 Bryan Russell 2 Abhinav Gupta 1 1 Carnegie Mellon University 2 Adobe Research http://www.cs.cmu.edu/ aayushb/marrrevisited/
arxiv: v1 [cs.cv] 30 Sep 2018
![arxiv: v1 [cs.cv] 30 Sep 2018](/thumbs/89/99613806.jpg "arxiv: v1 [cs.cv] 30 Sep 2018") 3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials
 Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials Yuanjun Xiong 1 Kai Zhu 1 Dahua Lin 1 Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University
Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials Yuanjun Xiong 1 Kai Zhu 1 Dahua Lin 1 Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization
 Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Pixels, voxels, and views: A study of shape representations for single view 3D object shape prediction
 Pixels, voxels, and views: A study of shape representations for single view 3D object shape prediction Daeyun Shin 1 Charless C. Fowlkes 1 Derek Hoiem 2 1 University of California, Irvine 2 University
Pixels, voxels, and views: A study of shape representations for single view 3D object shape prediction Daeyun Shin 1 Charless C. Fowlkes 1 Derek Hoiem 2 1 University of California, Irvine 2 University
arxiv: v2 [cs.cv] 24 Apr 2018
![arxiv: v2 [cs.cv] 24 Apr 2018](/thumbs/80/82338745.jpg "arxiv: v2 [cs.cv] 24 Apr 2018") Factoring Shape, Pose, and Layout from the 2D Image of a 3D Scene Shubham Tulsiani, Saurabh Gupta, David Fouhey, Alexei A. Efros, Jitendra Malik University of California, Berkeley {shubhtuls, sgupta, dfouhey,
Factoring Shape, Pose, and Layout from the 2D Image of a 3D Scene Shubham Tulsiani, Saurabh Gupta, David Fouhey, Alexei A. Efros, Jitendra Malik University of California, Berkeley {shubhtuls, sgupta, dfouhey,
3D Object Classification using Shape Distributions and Deep Learning
 3D Object Classification using Shape Distributions and Deep Learning Melvin Low Stanford University mwlow@cs.stanford.edu Abstract This paper shows that the Absolute Angle shape distribution (AAD) feature
3D Object Classification using Shape Distributions and Deep Learning Melvin Low Stanford University mwlow@cs.stanford.edu Abstract This paper shows that the Absolute Angle shape distribution (AAD) feature
3D ShapeNets for 2.5D Object Recognition and Next-Best-View Prediction
 3D ShapeNets for 2.5D Object Recognition and Next-Best-View Prediction Zhirong Wu Shuran Song Aditya Khosla Xiaoou Tang Jianxiong Xiao Princeton University MIT CUHK arxiv:1406.5670v2 [cs.cv] 1 Sep 2014
3D ShapeNets for 2.5D Object Recognition and Next-Best-View Prediction Zhirong Wu Shuran Song Aditya Khosla Xiaoou Tang Jianxiong Xiao Princeton University MIT CUHK arxiv:1406.5670v2 [cs.cv] 1 Sep 2014
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
The Hilbert Problems of Computer Vision. Jitendra Malik UC Berkeley & Google, Inc.
 The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
Detecting cars in aerial photographs with a hierarchy of deconvolution nets
 Detecting cars in aerial photographs with a hierarchy of deconvolution nets Satyaki Chakraborty Daniel Maturana Sebastian Scherer CMU-RI-TR-16-60 November 2016 Robotics Institute Carnegie Mellon University
Detecting cars in aerial photographs with a hierarchy of deconvolution nets Satyaki Chakraborty Daniel Maturana Sebastian Scherer CMU-RI-TR-16-60 November 2016 Robotics Institute Carnegie Mellon University
Using RGB, Depth, and Thermal Data for Improved Hand Detection
 Using RGB, Depth, and Thermal Data for Improved Hand Detection Rachel Luo, Gregory Luppescu Department of Electrical Engineering Stanford University {rsluo, gluppes}@stanford.edu Abstract Hand detection
Using RGB, Depth, and Thermal Data for Improved Hand Detection Rachel Luo, Gregory Luppescu Department of Electrical Engineering Stanford University {rsluo, gluppes}@stanford.edu Abstract Hand detection
Learning with Side Information through Modality Hallucination
 Master Seminar Report for Recent Trends in 3D Computer Vision Learning with Side Information through Modality Hallucination Judy Hoffman, Saurabh Gupta, Trevor Darrell. CVPR 2016 Nan Yang Supervisor: Benjamin
Master Seminar Report for Recent Trends in 3D Computer Vision Learning with Side Information through Modality Hallucination Judy Hoffman, Saurabh Gupta, Trevor Darrell. CVPR 2016 Nan Yang Supervisor: Benjamin
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
arxiv: v1 [cs.cv] 22 Jul 2014
![arxiv: v1 [cs.cv] 22 Jul 2014](/thumbs/82/86970964.jpg "arxiv: v1 [cs.cv] 22 Jul 2014") arxiv:1407.5736v1 [cs.cv] 22 Jul 2014 Learning Rich Features from RGB-D Images for Object Detection and Segmentation Saurabh Gupta 1, Ross Girshick 1, Pablo Arbeláez 1,2, and Jitendra Malik 1 {sgupta,
arxiv:1407.5736v1 [cs.cv] 22 Jul 2014 Learning Rich Features from RGB-D Images for Object Detection and Segmentation Saurabh Gupta 1, Ross Girshick 1, Pablo Arbeláez 1,2, and Jitendra Malik 1 {sgupta,
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Context. CS 554 Computer Vision Pinar Duygulu Bilkent University. (Source:Antonio Torralba, James Hays)
") Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images
 Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images Shuran Song Jianxiong Xiao Princeton University http://dss.cs.princeton.edu Abstract We focus on the task of amodal 3D object detection
Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images Shuran Song Jianxiong Xiao Princeton University http://dss.cs.princeton.edu Abstract We focus on the task of amodal 3D object detection
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in