UNIT IV I/O PROGRAMMING AND SCHEDULE MECHANISM
|
|
|
- Geraldine York
- 5 years ago
- Views:
Transcription
1 UNIT IV I/O PROGRAMMING AND SCHEDULE MECHANISM Intel I/O instruction Transfer rate, latency; interrupt driven I/O - Non-maskable interrupts; software interrupts, writing interrupt service routine in C & assembly languages; preventing interrupt overrun; disability interrupts. Multi threaded programming Context switching, premature & nonpremature multitasking, semaphores. Scheduling Thread states, pending threads, context switching, round robin scheduling, and priority based scheduling, assigning priorities, deadlock, and watch dog timers. OBJECTIVE: Intel I/O instruction Transfer rate, latency Basics of interrupt and interrupt driven I/O and Non-maskable interrupts Basics of software interrupts, writing interrupt service routine in C & assembly languages; preventing interrupt overrun; disability interrupts. Multi threaded programming Context switching, premature & non-premature multitasking semaphores. Scheduling
2 Thread states, pending threads, context switching, round robin scheduling, and priority based scheduling Assigning priorities, deadlock, and watch dog timers. INTEL I/O INSTRUCTIONS: The table-1 lists the various instructions for reading from or writing to an I/O port numbers are in the range and single byte. I/O address bus is 12 bits wide and valid port high as Instruction Operation flag IN AL,imm 8 IN AX,imm 8 acc port [imm] IN EAX,imm 8 IN AL,DX IN AX,DX acc port [DX] IN EAX,DX OUT imm 8,AL OUT imm 8,AX port [imm] acc unaffected OUT imm 8,EAX OUT DX,AL
3 OUT DX,AX port [imm] acc OUT DX,EAX INSB INSW INSD OUTB mem[edi] port [DX] If DF = 0; EDI EDI+1/2/4 If DF = 0; EDI EDI - 1/2/4 port [DX] mem[edi] These are part of the string instruction subset OUTSW If DF = 0; ESI ESI+1/2/4 OUTSD If DF = 0; ESI ESI - 1/2/4 Transfer rate: In telecommunications and computing, bit rate (sometimes written bit rate, data rate or as a variable R or fb) is the number of bits that are conveyed or processed per unit of time. It is simply a measure of the number of bytes per second transferred between the CPU and an external device. Maximum transfer rate is usually more important, since it gives a measure of the bandwidth capability of a particular method of doing I/O. Latency: Latency is often used to mean any delay or waiting that increases real or perceived response time beyond the response time desired. Specific contributors to computer latency include mismatches in data speed between the microprocessor and input/output devices and inadequate data
4 buffers.within a computer, latency can be removed or "hidden" by such techniques as prefetching (anticipating the need for data input requests) and multithreading, or using parallelism across multiple execution threads. POLLED I/O: In polled I/O the CPU must regularly check or poll each channel or port in turn to determine if it has information for input or is ready to accept data for output. A flag register can be used to check the port s status. Polling is time consuming. The CPU must pause between executing processing instructions and poll of each port. A port s status is examined in case action is required by the computer. The CPU reads or receives 8-bit encoded characters as they are typed on the keyboard. The CPU is programmed to read the input characters from an external device, in this case a keyboard. The keyboard inputs parallel 8-bit character codes for each depression of the keys. Characters are entered slowly as compared to the CPU s ability to process them. The dedicated CPU has to wait until the next character is entered each time. The CPU is programmed with what is known as an I/O wait loop. As the CPU executes the loop instructions, it periodically (say 20 times a second) checks the status code from the keyboard to see if a character has been entered. A data register, INBUF, in the keyboard interface receives the character data from the keyboard. It holds the data until read by the CPU.



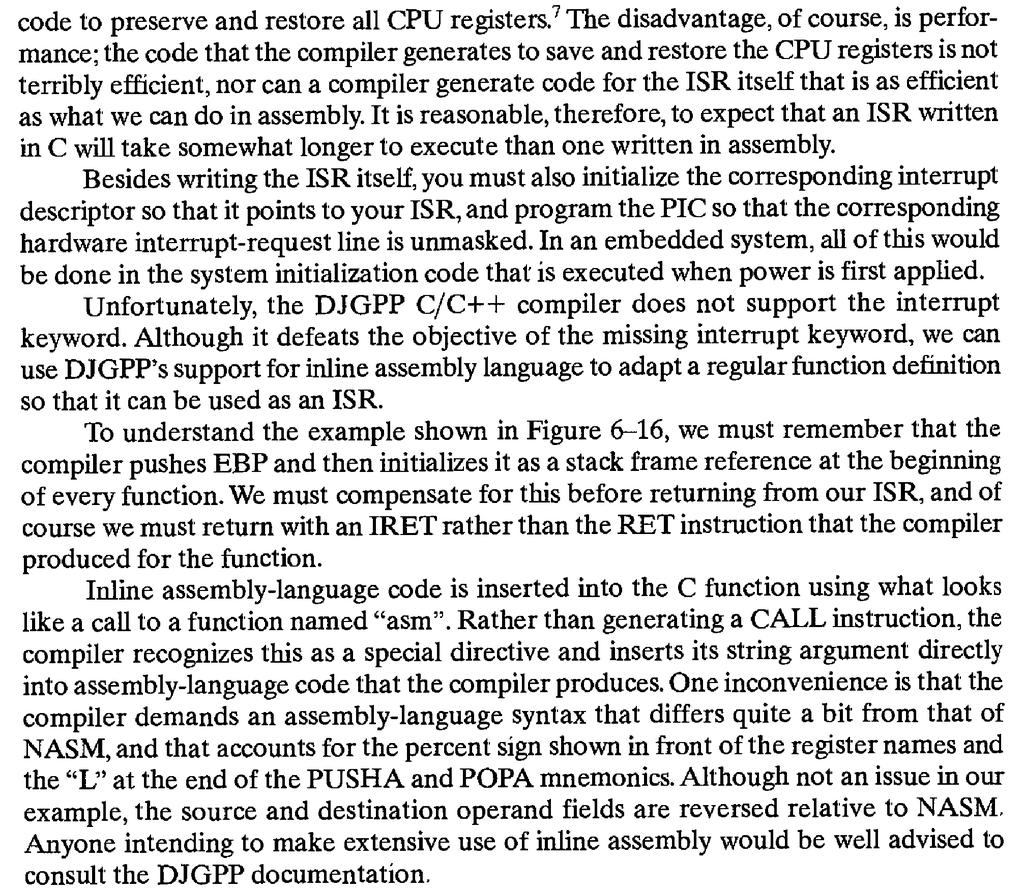
5 INTERRUPT DRIVEN I/O:


6

7

8


9

10


11
12
13 Objective type questions:

14


15
16 Objective type Questions:

17 Scheduling:

18
19


20


21


22

23 DEADLINE DRIVEN SCHEDULING:




24


25
26 Objective type questions:
27 SUMMARY: * DTMF: DUAL-TONE MULTI-FREQUENCY Dual-Tone Multiple Frequency (DTMF) transmitters incorporate a multifunctional tone generator which supports: DTMF dialing (the tone you hear when you press a number on a touch tone telephone) Melody-on-hold (generate a simple melody when you are on hold) Pacifier tone functions (acknowledge button pressed) Dual-Tone Multiple Frequency (DTMF) receivers can detect and qualify DTMF signals. The 68HC05F5 DTMF utilizes a switched capacitor technology for filtering. Included is a Pre-emphasis filter (for high frequency gain) and two band separation filters (for high and low frequencies). There are an additional eight band pass filters for final frequency selection. * EEPROM: ELECTRICALLY ERASEABLE PROGRAMMABLE READ ONLY MEMORY EPROM: ERASEABLE PROGRAMMABLE READ ONLY MEMORY Electrically Erasable Programmable Read Only Memory (EEPROM) and Erasable Programmable Read Only Memory (EPROM) are both types of ROM that can be programmed by the user. EPROM can be erased by exposing it to ultraviolet light, whereas EEPROM can be erased electrically (i.e., in the application). Once erased, EPROMs and EEPROMs may be reprogrammed with new instructions and data. EEPROM and EPROM
28 information is non-volatile in that it does not change when power is removed. * I/O: BI-DIRECTIONAL INPUT AND OUTPUT PORT PINS I: INPUT ONLY PORT PINS O: OUTPUT ONLY PORT PINS Bi-directional Input and Output (I/O) ports couple the microcontroller to external devices. This interface can operate in parallel or serial form and is usually digital (0 to +5Vdc) logic. Parallel interfaces allow I/O data transfer of eight bits at a time to parallel ports on the microcontroller. The technology is typically used to transfer data between the microcontroller and the external logic it controls. * KBI: KEY BOARD INTERRUPT Typical micro controller applications have some sort of user input in the form of pressing a button or keypad. In battery powered applications it is desirable to have the MCU in a low power wait or stop mode while waiting for keypad input. When a user presses a key on the keypad an interrupt is generated. The interrupt wakes the MCU out of low power mode to execute the code that is appropriate for the key that was pressed. The KBI port pins eliminate glue logic by having pull-up resistors and logic that generates an interrupt if any of the port pins are pulled low.
29 A typical MCU key matrix has the ROW lines connected to the KBI input port pins and the COLUMN lines connected to MCU output port pins. If any key in the matrix is pressed: The row of the key is pulled low, generating an interrupt that wakes the MCU up from low-power mode Software debounces and scans the columns to determine which key was deep * SPI: SERIAL PERIPHERAL INTERFACE (SYNCHRONOUS) The Serial Peripheral Interface (SPI) is similar to the SCI, although it is used to communicate synchronously over shorter distances at up to 4 Mbit/s. The SPI allows the micro controller to communicate with peripheral devices, which could be anything from a simple TTL shift register to a complete subsystem such as an LCD display or an A/D converter system. The SPI is flexible enough to interface directly with numerous standard peripherals from many manufacturers. SPIs can also be used to expand the number of inputs and outputs of the micro controller with the minimum number of pins. Typical applications are in peripheral communications. * OTPROM: ONE TIME PROGRAMMABLE READ ONLY MEMORY
30 One-time Programmable Read Only Memory (OTPROM) is an EPROM that does not have a window on top of the package, which means that the memory cannot be exposed to ultraviolet light and therefore cannot be erased and reprogrammed. OTPROM versions of most microcontrollers are available to support your development and production needs. OTP information is non-volatile in that it does not change when power is removed. * PLL: PHASE-LOCK LOOP The phase-locked loop (PLL) is a frequency generator that takes an input clock frequency and multiples it to a much higher frequency. The 68HC08 has two different PLL modules, one uses a 32Khz crystal as its input and another uses a 1-4 Mhz crystal. Both versions generate the internal clocks used to support 8Mhz bus operation. Without the PLL, 68HC08s would require a 32Mhz oscillator which is expensive and can potentially generate unwanted noise in the MCU application. The 68HC05 has several different PLL modules used to generate the high frequencies needed for on screen displays and closed-captioning * SCI: SERIAL COMMUNICATIONS INTERFACE (ASYNCHRONOUS) The Serial Communications Interface (SCI) is an independent serial I/O subsystem (full-duplex UART-type asynchronous system). The SCI can be
31 used for communications between the microcontroller and a terminal, PC, or other microcontrollers in the form of a network. An on-chip baud rate generator derives standard baud-rate frequencies from the microcontroller oscillator. A typical SCI application is long-distance communications (RS- 232). * OSD: ON-SCREEN DISPLAY The on-screen display (OSD) module converts programmed character addresses and control information into digital color and blanking outputs to display user defined characters on a television screen for on-screen programming and closed-captioning applications. * MFT: MULTI FUNCTION TIMER The timer system is used to measure time and to produce signals of specific frequency periods. Timers can be used in multiple ways: The CPU can control the timing of output signals through the output compare mechanism and monitor incoming signals through the input capture mechanism, and the CPU can use the timer system as an internal reference (e.g., delay loops or multiplexing between various software tasks). The timer can be used for virtually any timing function, including waveform generation, simple D/A conversion, and so on.
32 * LVR: LOW VOLTAGE RESET The low voltage reset (LVR) circuit monitors the operating voltage of the MCU and forces a reset of the MCU if the voltage drops below a predefined minimum. MCUs can continue to operate below the specified minimum voltage rating but may experience unpredictable operation before they fail. The LVR circuit places the MCU in the reset state before any unpredictable behavior can occur. * LVPI: LOW VOLTAGE PROGRAM INHIBIT The low voltage program inhibit (LVPI) circuit monitors the operating voltage of the MCU and inhibits programming of the MCU if the voltage drops below a predefined minimum. MCUs can continue to program below the specified minimum voltage rating but may experience unpredictable operation before programming fails. The LVPI circuit inhibits programming before any unpredictable behavior can occur. * IC: INPUT CAPTURE (TIMER FUNCTION) The input capture (IC) mechanism of a timer can be used to detect the time of an event or measure the period of an input signal. When the selected edge occurs, the current value of the free-running counter is captured by the input capture register, which can later be read by the CPU. This is the timer mechanism typically used in the timing of external events.
33 * THREAD STATES new - an empty thread, with no system resources allocated; all you can do is start it. runnable - the start() method is called, and the thread is not dead or in the ``not runnable'' state. not runnable - sleep() is invoked, thread calls wait(), thread is blocking on I/O. dead - the end of the run() method has been reached.
34 2-Marks Questions: 1. Define process. A code that has its independent program counter values and an independent stack. A single CPU system runs one process at a time. A process is a concept. It defines a sequentially executing program and its state. A state, during the running of a process,is represented by its stats, its control block, called process control block(pcb) or process structure. 2.Define task. The basic building block of software written under an RTOS is the task. Tasks are very simply to write, under most RTOS is a task is simply a subroutine. 3.What are the three states of each task in an RTOS? Each task in an RTOS is always in one of the three states. 1.Running 2.Ready 3.Blocked 4.When is a task in RTOS said to be in running state? A task in RTOS is said to be in running state when the microprocessor is executing the instructions that make up this task. Unless yours is a
35 multiprocessor syste, there is only one microprocessor and hence only one task that is in the running state at any given time. 5.What is meant by ready state in RTOS? Ready which means that some other task is in the running state but that this task has things that it could do if the microprocessor becomes available. Any number of tasks can be in this state. 6.When a task is said to be blocked? A task is said to be blocked when task hasn t got anything to do right now, even if the microprocessor becomes available. 7.What are different task states of an RTOS? The different task states of an RTOS are Running, ready, blocked, suspended, pended, waiting dormant and delayed 8.What is called scheduler? A part of the RTOS called the scheduler keeps track of the state of each task and decides which one task should go into the running state. 9.How does the scheduler know when a task has become blocked or unblocked?
36 The RTOS provides a collection of functions that tasks can call to tell the scheduler what events they want to wait for and to signal that events have happened. 10.What happens if all the tasks are blocked? If all the tasks are blocked, then the scheduler will spin in some tight loop somewhere inside of the RTOS, waiting for something to happen. 11.What if two tasks with some priority is ready? This depends upon the type of RTOS.Some RTOSs will time slice between two such tasks. Some will run one of them until it blocks and than run the other. 12.What are preemptive RTOSs and non-preemptive RTOSs? A preemptive RTOS will stop a lower-priority task as soon as the higher priority task unblocks. A nonpreemptive RTOS will only take the microprocessor away from the lower priority task when that task blocks. 13.What is context? Each task has its own private context, which includes the register values, a program counter and a stack.
37 14.What are reentrant functions? Reentrant functions are functions that can be called by more than one task and that will always work correctly, even if the RTOS switches from one task to another in the middle of executing the functions. 15.List out the three rules to decide if a function is reentrant. The three rules are 1.A reentrant function may not use variables in a nonatomic way unless they are stored on the stack of the task that called the function or are otherwise the private variables of that task. 2.A reentrant function may not call any other functions that are not themselves reentrant. 3.A reentrant function may not use the hardware in a nonatomic way. 16.What is a gray area? functions. Gray area is an area between reentrant and nonreentrant 17.What are semaphores? Semaphores are tools than can solve the shared data problems. Since only one task can take a semaphore at a time, semaphores can prevent shared
38 data from causing bugs. Semaphores have two associated functions take and release. 18.What is called a binary semaphore? If tasks in semaphore call two RTOS functions, take semaphore and release semaphore, it is called as a binary semaphore. 19.What does trains do with semaphores? Trains do two things with semaphores a. When a train leaves the protected section of track, it raises the semaphore. B.when a train comes to a semaphore, it waits for the semaphore to rise, if necessary passes through it and lowers the semaphore. 20.What are the terms used by RTOS to indicate a semaphore? The terms used by RTOS are 1.get and give 2.take and release 3.pend and post 4.p and v 5.wait and signal
39 21.Define nucleus. The functions and data structures whose names begin with NU are those used in an RTOS called nucleus. 22.What are the advantages of having multiple semaphores? The advantage is, whenever a task takes a semaphore it is potentially slowing the response of any other task that needs the same semaphore, eventhough it has to perform different function. So to avoid this multiple semaphores are used. 23.How does the RTOS know which semaphore protects which data? It does not know. If you are using multiple semaphores, it is up to you to remember which semaphore corresponds to which data. A task that is modifying the error count must take the corresponding semaphore. 24.Specify some of the semaphore problems. Some of the semaphore problems are 1.Forgetting to take the semaphore 2.Forgetting to release the semaphore 3.Taking the wrong semaphore 4.Holding a semaphore for too long 5.Causing a deadly embrace.
40 25.What are the different kinds of semaphores? The different kinds of semaphores are 1.Counting semaphore 2.Resource semaphores 3.Mutex semaphore 16 MARK QUESTIONS: 1.Discuss in detail about process, tasks and threads. 2.Explain in detail about operating system services and goals of kernels. 3.Discuss in detail about File system organization and implementation. 4.Discuss in detail about RTOS task scheduling models. 5.Explain in detail about Inter process communication and organization. 6.Write in detail about Shared data problem. 7.Discuss in detail about Message queues and mailboxes.. 8.Discuss in detail about Remote procedure calls. 9.Discuss in detail about Cooperative round robin scheduling.
MicroProcessor. MicroProcessor. MicroProcessor. MicroProcessor
 1 2 A microprocessor is a single, very-large-scale-integration (VLSI) chip that contains many digital circuits that perform arithmetic, logic, communication, and control functions. When a microprocessor
1 2 A microprocessor is a single, very-large-scale-integration (VLSI) chip that contains many digital circuits that perform arithmetic, logic, communication, and control functions. When a microprocessor
M68HC08 Microcontroller The MC68HC908GP32. General Description. MCU Block Diagram CPU08 1
 M68HC08 Microcontroller The MC68HC908GP32 Babak Kia Adjunct Professor Boston University College of Engineering Email: bkia -at- bu.edu ENG SC757 - Advanced Microprocessor Design General Description The
M68HC08 Microcontroller The MC68HC908GP32 Babak Kia Adjunct Professor Boston University College of Engineering Email: bkia -at- bu.edu ENG SC757 - Advanced Microprocessor Design General Description The
QUESTION BANK CS2252 MICROPROCESSOR AND MICROCONTROLLERS
 FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai -625 020 QUESTION BANK CS2252 MICROPROCESSOR AND MICROCONTROLLERS UNIT 1 - THE 8085 AND 8086
FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai -625 020 QUESTION BANK CS2252 MICROPROCESSOR AND MICROCONTROLLERS UNIT 1 - THE 8085 AND 8086
AVR XMEGA Product Line Introduction AVR XMEGA TM. Product Introduction.
 AVR XMEGA TM Product Introduction 32-bit AVR UC3 AVR Flash Microcontrollers The highest performance AVR in the world 8/16-bit AVR XMEGA Peripheral Performance 8-bit megaavr The world s most successful
AVR XMEGA TM Product Introduction 32-bit AVR UC3 AVR Flash Microcontrollers The highest performance AVR in the world 8/16-bit AVR XMEGA Peripheral Performance 8-bit megaavr The world s most successful
Lecture notes Lectures 1 through 5 (up through lecture 5 slide 63) Book Chapters 1-4
 Book Chapters 1-4") EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
EE445M Midterm Study Guide (Spring 2017) (updated February 25, 2017): Instructions: Open book and open notes. No calculators or any electronic devices (turn cell phones off). Please be sure that your answers
UNIT V MICRO CONTROLLER PROGRAMMING & APPLICATIONS TWO MARKS. 3.Give any two differences between microprocessor and micro controller.
 UNIT V -8051 MICRO CONTROLLER PROGRAMMING & APPLICATIONS TWO MARKS 1. What is micro controller? Micro controller is a microprocessor with limited number of RAM, ROM, I/O ports and timer on a single chip
UNIT V -8051 MICRO CONTROLLER PROGRAMMING & APPLICATIONS TWO MARKS 1. What is micro controller? Micro controller is a microprocessor with limited number of RAM, ROM, I/O ports and timer on a single chip
 Chapter 1 Microprocessor architecture ECE 3120 Dr. Mohamed Mahmoud http://iweb.tntech.edu/mmahmoud/ mmahmoud@tntech.edu Outline 1.1 Computer hardware organization 1.1.1 Number System 1.1.2 Computer hardware
Chapter 1 Microprocessor architecture ECE 3120 Dr. Mohamed Mahmoud http://iweb.tntech.edu/mmahmoud/ mmahmoud@tntech.edu Outline 1.1 Computer hardware organization 1.1.1 Number System 1.1.2 Computer hardware
Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
Embedded System Curriculum
 Embedded System Curriculum ADVANCED C PROGRAMMING AND DATA STRUCTURE (Duration: 25 hrs) Introduction to 'C' Objectives of C, Applications of C, Relational and logical operators, Bit wise operators, The
Embedded System Curriculum ADVANCED C PROGRAMMING AND DATA STRUCTURE (Duration: 25 hrs) Introduction to 'C' Objectives of C, Applications of C, Relational and logical operators, Bit wise operators, The
PIC Microcontroller Introduction
 PIC Microcontroller Introduction The real name of this microcontroller is PICmicro (Peripheral Interface Controller), but it is better known as PIC. Its first ancestor was designed in 1975 by General Instruments.
PIC Microcontroller Introduction The real name of this microcontroller is PICmicro (Peripheral Interface Controller), but it is better known as PIC. Its first ancestor was designed in 1975 by General Instruments.
Understanding the basic building blocks of a microcontroller device in general. Knows the terminologies like embedded and external memory devices,
 Understanding the basic building blocks of a microcontroller device in general. Knows the terminologies like embedded and external memory devices, CISC and RISC processors etc. Knows the architecture and
Understanding the basic building blocks of a microcontroller device in general. Knows the terminologies like embedded and external memory devices, CISC and RISC processors etc. Knows the architecture and
Microprocessors/Microcontrollers
 Microprocessors/Microcontrollers A central processing unit (CPU) fabricated on one or more chips, containing the basic arithmetic, logic, and control elements of a computer that are required for processing
Microprocessors/Microcontrollers A central processing unit (CPU) fabricated on one or more chips, containing the basic arithmetic, logic, and control elements of a computer that are required for processing
Product Technical Brief S3C2412 Rev 2.2, Apr. 2006
 Product Technical Brief S3C2412 Rev 2.2, Apr. 2006 Overview SAMSUNG's S3C2412 is a Derivative product of S3C2410A. S3C2412 is designed to provide hand-held devices and general applications with cost-effective,
Product Technical Brief S3C2412 Rev 2.2, Apr. 2006 Overview SAMSUNG's S3C2412 is a Derivative product of S3C2410A. S3C2412 is designed to provide hand-held devices and general applications with cost-effective,
INTERRUPTS in microprocessor systems
 INTERRUPTS in microprocessor systems Microcontroller Power Supply clock fx (Central Proccesor Unit) CPU Reset Hardware Interrupts system IRQ Internal address bus Internal data bus Internal control bus
INTERRUPTS in microprocessor systems Microcontroller Power Supply clock fx (Central Proccesor Unit) CPU Reset Hardware Interrupts system IRQ Internal address bus Internal data bus Internal control bus
Part B Questions. Unit I
 Part B Questions Unit I 1. Explain the specification of Embedded system. Safety and Reliability Performance Power Consumption Cost Robustness Size Limited User Interface Software Upgradation Capability
Part B Questions Unit I 1. Explain the specification of Embedded system. Safety and Reliability Performance Power Consumption Cost Robustness Size Limited User Interface Software Upgradation Capability
Real-Time Programming
 Real-Time Programming Week 7: Real-Time Operating Systems Instructors Tony Montiel & Ken Arnold rtp@hte.com 4/1/2003 Co Montiel 1 Objectives o Introduction to RTOS o Event Driven Systems o Synchronization
Real-Time Programming Week 7: Real-Time Operating Systems Instructors Tony Montiel & Ken Arnold rtp@hte.com 4/1/2003 Co Montiel 1 Objectives o Introduction to RTOS o Event Driven Systems o Synchronization
Microcontrollers. Principles and Applications. Ajit Pal +5 V 2K 8. 8 bit dip switch. P2 8 Reset switch Microcontroller AT89S52 100E +5 V. 2.
 Ajit Pal Microcontrollers Principles and Applications +5 V 2K 8 8 bit dip switch P2 8 Reset switch Microcontroller AT89S52 100E +5 V +5 V 2.2K 10 uf RST 7 Segment common anode LEDs P1(0-6) & P3(0-6) 7
Ajit Pal Microcontrollers Principles and Applications +5 V 2K 8 8 bit dip switch P2 8 Reset switch Microcontroller AT89S52 100E +5 V +5 V 2.2K 10 uf RST 7 Segment common anode LEDs P1(0-6) & P3(0-6) 7
Design and development of embedded systems for the Internet of Things (IoT) Fabio Angeletti Fabrizio Gattuso
 Fabio Angeletti Fabrizio Gattuso") Design and development of embedded systems for the Internet of Things (IoT) Fabio Angeletti Fabrizio Gattuso Microcontroller It is essentially a small computer on a chip Like any computer, it has memory,
Design and development of embedded systems for the Internet of Things (IoT) Fabio Angeletti Fabrizio Gattuso Microcontroller It is essentially a small computer on a chip Like any computer, it has memory,
TEVATRON TECHNOLOGIES PVT. LTD Embedded! Robotics! IoT! VLSI Design! Projects! Technical Consultancy! Education! STEM! Software!
 Summer Training 2016 Advance Embedded Systems Fast track of AVR and detailed working on STM32 ARM Processor with RTOS- Real Time Operating Systems Covering 1. Hands on Topics and Sessions Covered in Summer
Summer Training 2016 Advance Embedded Systems Fast track of AVR and detailed working on STM32 ARM Processor with RTOS- Real Time Operating Systems Covering 1. Hands on Topics and Sessions Covered in Summer
MLR INSTITUTE OF TECHNOLOGY DUNDIGAL , HYDERABAD QUESTION BANK
 MLR INSTITUTE OF TECHNOLOGY DUNDIGAL - 500 043, HYDERABAD QUESTION BANK Course Name : EMBEDDED SYSTEMS Course Code : A57043 Class : IV B. Tech I Semester Branch : ECE Year : 2015 2016 Course Faculty :
MLR INSTITUTE OF TECHNOLOGY DUNDIGAL - 500 043, HYDERABAD QUESTION BANK Course Name : EMBEDDED SYSTEMS Course Code : A57043 Class : IV B. Tech I Semester Branch : ECE Year : 2015 2016 Course Faculty :
Product Technical Brief S3C2413 Rev 2.2, Apr. 2006
 Product Technical Brief Rev 2.2, Apr. 2006 Overview SAMSUNG's is a Derivative product of S3C2410A. is designed to provide hand-held devices and general applications with cost-effective, low-power, and
Product Technical Brief Rev 2.2, Apr. 2006 Overview SAMSUNG's is a Derivative product of S3C2410A. is designed to provide hand-held devices and general applications with cost-effective, low-power, and
Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
Microcontroller basics
 FYS3240 PC-based instrumentation and microcontrollers Microcontroller basics Spring 2017 Lecture #4 Bekkeng, 30.01.2017 Lab: AVR Studio Microcontrollers can be programmed using Assembly or C language In
FYS3240 PC-based instrumentation and microcontrollers Microcontroller basics Spring 2017 Lecture #4 Bekkeng, 30.01.2017 Lab: AVR Studio Microcontrollers can be programmed using Assembly or C language In
8051 Microcontroller
 8051 Microcontroller The 8051, Motorola and PIC families are the 3 leading sellers in the microcontroller market. The 8051 microcontroller was originally developed by Intel in the late 1970 s. Today many
8051 Microcontroller The 8051, Motorola and PIC families are the 3 leading sellers in the microcontroller market. The 8051 microcontroller was originally developed by Intel in the late 1970 s. Today many
The Freescale MC908JL16 Microcontroller
 Ming Hsieh Department of Electrical Engineering EE 459Lx - Embedded Systems Design Laboratory The Freescale MC908JL16 Microcontroller by Allan G. Weber 1 Introduction The Freescale MC908JL16 (also called
Ming Hsieh Department of Electrical Engineering EE 459Lx - Embedded Systems Design Laboratory The Freescale MC908JL16 Microcontroller by Allan G. Weber 1 Introduction The Freescale MC908JL16 (also called
AVR XMEGA TM. A New Reference for 8/16-bit Microcontrollers. Ingar Fredriksen AVR Product Marketing Director
 AVR XMEGA TM A New Reference for 8/16-bit Microcontrollers Ingar Fredriksen AVR Product Marketing Director Kristian Saether AVR Product Marketing Manager Atmel AVR Success Through Innovation First Flash
AVR XMEGA TM A New Reference for 8/16-bit Microcontrollers Ingar Fredriksen AVR Product Marketing Director Kristian Saether AVR Product Marketing Manager Atmel AVR Success Through Innovation First Flash
EMBEDDED SYSTEMS PART A UNIT-1
 EMBEDDED SYSTEMS PART A UNIT-1 1. What is Embedded System? Give some applications and examples. 2. Differentiate RTOS and an ordinary OS. 3. What is Hard RTS and Soft RTS? 4. What are the categories of
EMBEDDED SYSTEMS PART A UNIT-1 1. What is Embedded System? Give some applications and examples. 2. Differentiate RTOS and an ordinary OS. 3. What is Hard RTS and Soft RTS? 4. What are the categories of
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6602- EMBEDDED SYSTEMS QUESTION BANK UNIT I - INTRODUCTION TO EMBEDDED SYSTEMS PART A
 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6602- EMBEDDED SYSTEMS QUESTION BANK UNIT I - INTRODUCTION TO EMBEDDED SYSTEMS PART A 1. Define system. A system is a way of working, organizing or
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6602- EMBEDDED SYSTEMS QUESTION BANK UNIT I - INTRODUCTION TO EMBEDDED SYSTEMS PART A 1. Define system. A system is a way of working, organizing or
MICROCONTROLLER AND PLC LAB-436 SEMESTER-5
 MICROCONTROLLER AND PLC LAB-436 SEMESTER-5 Exp:1 STUDY OF MICROCONTROLLER 8051 To study the microcontroller and familiarize the 8051microcontroller kit Theory:- A Microcontroller consists of a powerful
MICROCONTROLLER AND PLC LAB-436 SEMESTER-5 Exp:1 STUDY OF MICROCONTROLLER 8051 To study the microcontroller and familiarize the 8051microcontroller kit Theory:- A Microcontroller consists of a powerful
Question Bank Microprocessor and Microcontroller
 QUESTION BANK - 2 PART A 1. What is cycle stealing? (K1-CO3) During any given bus cycle, one of the system components connected to the system bus is given control of the bus. This component is said to
QUESTION BANK - 2 PART A 1. What is cycle stealing? (K1-CO3) During any given bus cycle, one of the system components connected to the system bus is given control of the bus. This component is said to
DTMF BASED INDUSTRIAL AUTOMATION
 DTMF BASED INDUSTRIAL AUTOMATION Shobhnendra Kumar 1, Shrishti Srivastava 2, Pallavi Gupta 3 1, 2 Students, Electrical Engineering Department, Greater Noida Institutes of Technology, Gr.Noida, (India)
DTMF BASED INDUSTRIAL AUTOMATION Shobhnendra Kumar 1, Shrishti Srivastava 2, Pallavi Gupta 3 1, 2 Students, Electrical Engineering Department, Greater Noida Institutes of Technology, Gr.Noida, (India)
Tutorial Introduction
 Tutorial Introduction PURPOSE: This tutorial describes the key features of the DSP56300 family of processors. OBJECTIVES: Describe the main features of the DSP 24-bit core. Identify the features and functions
Tutorial Introduction PURPOSE: This tutorial describes the key features of the DSP56300 family of processors. OBJECTIVES: Describe the main features of the DSP 24-bit core. Identify the features and functions
PART B UNIT II PART A
 SRM INSTITUTE OF SCIENCE AND TECHNOLOGY (Deemed University) DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING QUESTION BANK SUB : Microprocessor/CS201 YEAR/SEM : II/III UNIT I PART - A 1. Differentiate accumulator
SRM INSTITUTE OF SCIENCE AND TECHNOLOGY (Deemed University) DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING QUESTION BANK SUB : Microprocessor/CS201 YEAR/SEM : II/III UNIT I PART - A 1. Differentiate accumulator
Infineon C167CR microcontroller, 256 kb external. RAM and 256 kb external (Flash) EEPROM. - Small single-board computer (SBC) with an
 EEPROM. - Small single-board computer (SBC) with an") Microcontroller Basics MP2-1 week lecture topics 2 Microcontroller basics - Clock generation, PLL - Address space, addressing modes - Central Processing Unit (CPU) - General Purpose Input/Output (GPIO)
Microcontroller Basics MP2-1 week lecture topics 2 Microcontroller basics - Clock generation, PLL - Address space, addressing modes - Central Processing Unit (CPU) - General Purpose Input/Output (GPIO)
Embedded Systems. Read pages
 Embedded Systems Read pages 385-417 Definition of Embedded Systems Embedded systems Computer dedicated to serve specific purposes Many physical systems today use computer for powerful and intelligent applications
Embedded Systems Read pages 385-417 Definition of Embedded Systems Embedded systems Computer dedicated to serve specific purposes Many physical systems today use computer for powerful and intelligent applications
Hello, and welcome to this presentation of the STM32 Low Power Universal Asynchronous Receiver/Transmitter interface. It covers the main features of
 Hello, and welcome to this presentation of the STM32 Low Power Universal Asynchronous Receiver/Transmitter interface. It covers the main features of this interface, which is widely used for serial communications.
Hello, and welcome to this presentation of the STM32 Low Power Universal Asynchronous Receiver/Transmitter interface. It covers the main features of this interface, which is widely used for serial communications.
Introduction to Embedded Systems
 Stefan Kowalewski, 4. November 25 Introduction to Embedded Systems Part 2: Microcontrollers. Basics 2. Structure/elements 3. Digital I/O 4. Interrupts 5. Timers/Counters Introduction to Embedded Systems
Stefan Kowalewski, 4. November 25 Introduction to Embedded Systems Part 2: Microcontrollers. Basics 2. Structure/elements 3. Digital I/O 4. Interrupts 5. Timers/Counters Introduction to Embedded Systems
VALLIAMMAI ENGINEERING COLLEGE
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203 DEPARTMENT OF ELECTRONICS AND INSTRUMENTATION ENGINEERING QUESTION BANK VI SEMESTER EE6602 EMBEDDED SYSTEMS Regulation 2013 Academic Year
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203 DEPARTMENT OF ELECTRONICS AND INSTRUMENTATION ENGINEERING QUESTION BANK VI SEMESTER EE6602 EMBEDDED SYSTEMS Regulation 2013 Academic Year
SH69P55A EVB. Application Note for SH69P55A EVB SH69P55A EVB SH69V55A
 Application Note for SH69P55A EVB SH69P55A EVB The SH69P55A EVB is used to evaluate the SH69P55A chip's function for the development of application program. It contains of a SH69V55A chip to evaluate the
Application Note for SH69P55A EVB SH69P55A EVB The SH69P55A EVB is used to evaluate the SH69P55A chip's function for the development of application program. It contains of a SH69V55A chip to evaluate the
Overview of Microcontroller and Embedded Systems
 UNIT-III Overview of Microcontroller and Embedded Systems Embedded Hardware and Various Building Blocks: The basic hardware components of an embedded system shown in a block diagram in below figure. These
UNIT-III Overview of Microcontroller and Embedded Systems Embedded Hardware and Various Building Blocks: The basic hardware components of an embedded system shown in a block diagram in below figure. These
Fredrick M. Cady. Assembly and С Programming forthefreescalehcs12 Microcontroller. шт.
 SECOND шт. Assembly and С Programming forthefreescalehcs12 Microcontroller Fredrick M. Cady Department of Electrical and Computer Engineering Montana State University New York Oxford Oxford University
SECOND шт. Assembly and С Programming forthefreescalehcs12 Microcontroller Fredrick M. Cady Department of Electrical and Computer Engineering Montana State University New York Oxford Oxford University
Embedded Systems Lab Lab 1 Introduction to Microcontrollers Eng. Dalia A. Awad
 Embedded Systems Lab Lab 1 Introduction to Microcontrollers Eng. Dalia A. Awad Objectives To be familiar with microcontrollers, PIC18F4550 microcontroller. Tools PIC18F4550 Microcontroller, MPLAB software,
Embedded Systems Lab Lab 1 Introduction to Microcontrollers Eng. Dalia A. Awad Objectives To be familiar with microcontrollers, PIC18F4550 microcontroller. Tools PIC18F4550 Microcontroller, MPLAB software,
Chapter 4. Enhancing ARM7 architecture by embedding RTOS
 Chapter 4 Enhancing ARM7 architecture by embedding RTOS 4.1 ARM7 architecture 4.2 ARM7TDMI processor core 4.3 Embedding RTOS on ARM7TDMI architecture 4.4 Block diagram of the Design 4.5 Hardware Design
Chapter 4 Enhancing ARM7 architecture by embedding RTOS 4.1 ARM7 architecture 4.2 ARM7TDMI processor core 4.3 Embedding RTOS on ARM7TDMI architecture 4.4 Block diagram of the Design 4.5 Hardware Design
Short Term Courses (Including Project Work)
") Short Term Courses (Including Project Work) Courses: 1.) Microcontrollers and Embedded C Programming (8051, PIC & ARM, includes a project on Robotics) 2.) DSP (Code Composer Studio & MATLAB, includes Embedded
Short Term Courses (Including Project Work) Courses: 1.) Microcontrollers and Embedded C Programming (8051, PIC & ARM, includes a project on Robotics) 2.) DSP (Code Composer Studio & MATLAB, includes Embedded
How to Implement I 2 C Serial Communication Using Intel MCS-51 Microcontrollers
 APPLICATION NOTE How to Implement I 2 C Serial Communication Using Intel MCS-51 Microcontrollers SABRINA D QUARLES APPLICATIONS ENGINEER April 1993 Order Number 272319-001 Information in this document
APPLICATION NOTE How to Implement I 2 C Serial Communication Using Intel MCS-51 Microcontrollers SABRINA D QUARLES APPLICATIONS ENGINEER April 1993 Order Number 272319-001 Information in this document
THE MICROCOMPUTER SYSTEM CHAPTER - 2
 THE MICROCOMPUTER SYSTEM CHAPTER - 2 20 2.1 GENERAL ASPECTS The first computer was developed using vacuum tubes. The computers thus developed were clumsy and dissipating more power. After the invention
THE MICROCOMPUTER SYSTEM CHAPTER - 2 20 2.1 GENERAL ASPECTS The first computer was developed using vacuum tubes. The computers thus developed were clumsy and dissipating more power. After the invention
AN10210 Using the Philips 87LPC76x microcontroller as a remote control transmitter
 CIRCUITS ITEGRATED CIRCUITS ABSTRACT This application note illustrates the use of an 87LPC76x microcontroller from Philips Semiconductors as an infrared RC5. Using the Philips 87LPC76x microcontroller
CIRCUITS ITEGRATED CIRCUITS ABSTRACT This application note illustrates the use of an 87LPC76x microcontroller from Philips Semiconductors as an infrared RC5. Using the Philips 87LPC76x microcontroller
MLR INSTITUTE OF TECHNOLOGY DUNDIGAL , HYDERABAD
 Name Code : 56012 Class Branch MR INSTITUTE OF TECHNOOGY DUNDIGA - 500 043, HYDERABAD EECTRONICS AND COMMUNICATION ENGINEERING ASSIGNMENT QUESTIONS : MICROPROCESSORS AND MICROCONTROERS : III - B. Tech
Name Code : 56012 Class Branch MR INSTITUTE OF TECHNOOGY DUNDIGA - 500 043, HYDERABAD EECTRONICS AND COMMUNICATION ENGINEERING ASSIGNMENT QUESTIONS : MICROPROCESSORS AND MICROCONTROERS : III - B. Tech
CHAPTER 1 MICROCOMPUTER SYSTEMS. 1.1 Introduction. 1.2 Microcontroller Evolution
 CHAPTER 1 MICROCOMPUTER SYSTEMS 1.1 Introduction The term microcomputer is used to describe a system that includes a microprocessor, program memory, data memory, and an input/output (I/O). Some microcomputer
CHAPTER 1 MICROCOMPUTER SYSTEMS 1.1 Introduction The term microcomputer is used to describe a system that includes a microprocessor, program memory, data memory, and an input/output (I/O). Some microcomputer
Introduction to ARM LPC2148 Microcontroller
 Introduction to ARM LPC2148 Microcontroller Dr.R.Sundaramurthy Department of EIE Pondicherry Engineering College Features of LPC2148 in a Nut Shell CPU = ARM 7 Core Word Length = 32 Bit ROM = 512 KB RAM
Introduction to ARM LPC2148 Microcontroller Dr.R.Sundaramurthy Department of EIE Pondicherry Engineering College Features of LPC2148 in a Nut Shell CPU = ARM 7 Core Word Length = 32 Bit ROM = 512 KB RAM
Module 2. Embedded Processors and Memory. Version 2 EE IIT, Kharagpur 1
 Module 2 Embedded Processors and Memory Version 2 EE IIT, Kharagpur 1 Lesson 10 Embedded Processors - I Version 2 EE IIT, Kharagpur 2 In this lesson the student will learn the following Architecture of
Module 2 Embedded Processors and Memory Version 2 EE IIT, Kharagpur 1 Lesson 10 Embedded Processors - I Version 2 EE IIT, Kharagpur 2 In this lesson the student will learn the following Architecture of
Systemy RT i embedded Wykład 11 Systemy RTOS
 Systemy RT i embedded Wykład 11 Systemy RTOS Wrocław 2013 Plan Introduction Tasks Queues Interrupts Resources Memory management Multiprocessor operation Introduction What s an Operating System? Provides
Systemy RT i embedded Wykład 11 Systemy RTOS Wrocław 2013 Plan Introduction Tasks Queues Interrupts Resources Memory management Multiprocessor operation Introduction What s an Operating System? Provides
Mechatronics and Measurement. Lecturer:Dung-An Wang Lecture 6
 Mechatronics and Measurement Lecturer:Dung-An Wang Lecture 6 Lecture outline Reading:Ch7 of text Today s lecture: Microcontroller 2 7.1 MICROPROCESSORS Hardware solution: consists of a selection of specific
Mechatronics and Measurement Lecturer:Dung-An Wang Lecture 6 Lecture outline Reading:Ch7 of text Today s lecture: Microcontroller 2 7.1 MICROPROCESSORS Hardware solution: consists of a selection of specific
CMS-8GP32. A Motorola MC68HC908GP32 Microcontroller Board. xiom anufacturing
 CMS-8GP32 A Motorola MC68HC908GP32 Microcontroller Board xiom anufacturing 2000 717 Lingco Dr., Suite 209 Richardson, TX 75081 (972) 994-9676 FAX (972) 994-9170 email: Gary@axman.com web: http://www.axman.com
CMS-8GP32 A Motorola MC68HC908GP32 Microcontroller Board xiom anufacturing 2000 717 Lingco Dr., Suite 209 Richardson, TX 75081 (972) 994-9676 FAX (972) 994-9170 email: Gary@axman.com web: http://www.axman.com
PIN DIAGRAM. Richa Upadhyay Prabhu. NMIMS s MPSTME January 19, 2016
 PIN DIAGRAM Richa Upadhyay Prabhu NMIMS s MPSTME richa.upadhyay@nmims.edu January 19, 2016 Richa Upadhyay Prabhu (MPSTME) 8080 Microprocessor January 19, 2016 1 / 51 Pin Diagram of 8086 Richa Upadhyay
PIN DIAGRAM Richa Upadhyay Prabhu NMIMS s MPSTME richa.upadhyay@nmims.edu January 19, 2016 Richa Upadhyay Prabhu (MPSTME) 8080 Microprocessor January 19, 2016 1 / 51 Pin Diagram of 8086 Richa Upadhyay
Chapter 13: I/O Systems
 Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance Objectives Explore the structure of an operating
Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance Objectives Explore the structure of an operating
SECTION 5 RESETS AND INTERRUPTS
 SECTION RESETS AND INTERRUPTS Resets and interrupt operations load the program counter with a vector that points to a new location from which instructions are to be fetched. A reset immediately stops execution
SECTION RESETS AND INTERRUPTS Resets and interrupt operations load the program counter with a vector that points to a new location from which instructions are to be fetched. A reset immediately stops execution
CMPE401 Computer Interfacing
 CMPE401 Computer Interfacing MIDTERM EXAMINATION October 24, 2007 Name: ID: 5 questions. 50 minutes. Allowed material: Course notes A 68000 Programming Reference Card Calculators Model solutions of midterms,
CMPE401 Computer Interfacing MIDTERM EXAMINATION October 24, 2007 Name: ID: 5 questions. 50 minutes. Allowed material: Course notes A 68000 Programming Reference Card Calculators Model solutions of midterms,
Clock and Fuses. Prof. Prabhat Ranjan Dhirubhai Ambani Institute of Information and Communication Technology, Gandhinagar
 Clock and Fuses Prof. Prabhat Ranjan Dhirubhai Ambani Institute of Information and Communication Technology, Gandhinagar Reference WHY YOU NEED A CLOCK SOURCE - COLIN O FLYNN avrfreaks.net http://en.wikibooks.org/wiki/atmel_avr
Clock and Fuses Prof. Prabhat Ranjan Dhirubhai Ambani Institute of Information and Communication Technology, Gandhinagar Reference WHY YOU NEED A CLOCK SOURCE - COLIN O FLYNN avrfreaks.net http://en.wikibooks.org/wiki/atmel_avr
EC6504 MICROPROCESSOR AND MICROCONTROLLER
 UNIT I THE 8086 MICROPROCESSOR 1. What do you mean by Addressing modes? (May/June 2014) The different ways that a microprocessor can access data are referred to as addressing modes. 2. What is meant by
UNIT I THE 8086 MICROPROCESSOR 1. What do you mean by Addressing modes? (May/June 2014) The different ways that a microprocessor can access data are referred to as addressing modes. 2. What is meant by
Hello, and welcome to this presentation of the STM32 Universal Synchronous/Asynchronous Receiver/Transmitter Interface. It covers the main features
 Hello, and welcome to this presentation of the STM32 Universal Synchronous/Asynchronous Receiver/Transmitter Interface. It covers the main features of this USART interface, which is widely used for serial
Hello, and welcome to this presentation of the STM32 Universal Synchronous/Asynchronous Receiver/Transmitter Interface. It covers the main features of this USART interface, which is widely used for serial
Programming Embedded Systems
 Programming Embedded Systems Lecture 5 Interrupts, modes of multi-tasking Wednesday Feb 1, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/31 Lecture outline Interrupts Internal, external,
Programming Embedded Systems Lecture 5 Interrupts, modes of multi-tasking Wednesday Feb 1, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/31 Lecture outline Interrupts Internal, external,
 UNIT -3 PROCESS AND OPERATING SYSTEMS 2marks 1. Define Process? Process is a computational unit that processes on a CPU under the control of a scheduling kernel of an OS. It has a process structure, called
UNIT -3 PROCESS AND OPERATING SYSTEMS 2marks 1. Define Process? Process is a computational unit that processes on a CPU under the control of a scheduling kernel of an OS. It has a process structure, called
Module 1. Introduction. Version 2 EE IIT, Kharagpur 1
 Module 1 Introduction Version 2 EE IIT, Kharagpur 1 Lesson 3 Embedded Systems Components Part I Version 2 EE IIT, Kharagpur 2 Structural Layout with Example Instructional Objectives After going through
Module 1 Introduction Version 2 EE IIT, Kharagpur 1 Lesson 3 Embedded Systems Components Part I Version 2 EE IIT, Kharagpur 2 Structural Layout with Example Instructional Objectives After going through
EE4390 Microprocessors. Lessons 2, 3 68HC12 Hardware Overview, Subsystems, and memory System
 EE4390 Microprocessors Lessons 2, 3 68HC12 Hardware Overview, Subsystems, and memory System 1 Overview 68HC12 hardware overview Subsystems Memory System 2 68HC12 Hardware Overview "Copyright of Motorola,
EE4390 Microprocessors Lessons 2, 3 68HC12 Hardware Overview, Subsystems, and memory System 1 Overview 68HC12 hardware overview Subsystems Memory System 2 68HC12 Hardware Overview "Copyright of Motorola,
SYLLABUS UNIT - I 8086/8088 ARCHITECTURE AND INSTRUCTION SET
 1 SYLLABUS UNIT - I 8086/8088 ARCHITECTURE AND INSTRUCTION SET Intel 8086/8088 Architecture Segmented Memory, Minimum and Maximum Modes of Operation, Timing Diagram, Addressing Modes, Instruction Set,
1 SYLLABUS UNIT - I 8086/8088 ARCHITECTURE AND INSTRUCTION SET Intel 8086/8088 Architecture Segmented Memory, Minimum and Maximum Modes of Operation, Timing Diagram, Addressing Modes, Instruction Set,
Product Technical Brief S3C2440X Series Rev 2.0, Oct. 2003
 Product Technical Brief S3C2440X Series Rev 2.0, Oct. 2003 S3C2440X is a derivative product of Samsung s S3C24XXX family of microprocessors for mobile communication market. The S3C2440X s main enhancement
Product Technical Brief S3C2440X Series Rev 2.0, Oct. 2003 S3C2440X is a derivative product of Samsung s S3C24XXX family of microprocessors for mobile communication market. The S3C2440X s main enhancement
EC EMBEDDED AND REAL TIME SYSTEMS
 EC6703 - EMBEDDED AND REAL TIME SYSTEMS Unit I -I INTRODUCTION TO EMBEDDED COMPUTING Part-A (2 Marks) 1. What is an embedded system? An embedded system employs a combination of hardware & software (a computational
EC6703 - EMBEDDED AND REAL TIME SYSTEMS Unit I -I INTRODUCTION TO EMBEDDED COMPUTING Part-A (2 Marks) 1. What is an embedded system? An embedded system employs a combination of hardware & software (a computational
MICROPROCESSOR AND MICROCONTROLLER BASED SYSTEMS
 MICROPROCESSOR AND MICROCONTROLLER BASED SYSTEMS UNIT I INTRODUCTION TO 8085 8085 Microprocessor - Architecture and its operation, Concept of instruction execution and timing diagrams, fundamentals of
MICROPROCESSOR AND MICROCONTROLLER BASED SYSTEMS UNIT I INTRODUCTION TO 8085 8085 Microprocessor - Architecture and its operation, Concept of instruction execution and timing diagrams, fundamentals of
The control of I/O devices is a major concern for OS designers
 Lecture Overview I/O devices I/O hardware Interrupts Direct memory access Device dimensions Device drivers Kernel I/O subsystem Operating Systems - June 26, 2001 I/O Device Issues The control of I/O devices
Lecture Overview I/O devices I/O hardware Interrupts Direct memory access Device dimensions Device drivers Kernel I/O subsystem Operating Systems - June 26, 2001 I/O Device Issues The control of I/O devices
MICROPROCESSOR BASED SYSTEM DESIGN
 MICROPROCESSOR BASED SYSTEM DESIGN Lecture 5 Xmega 128 B1: Architecture MUHAMMAD AMIR YOUSAF VON NEUMAN ARCHITECTURE CPU Memory Execution unit ALU Registers Both data and instructions at the same system
MICROPROCESSOR BASED SYSTEM DESIGN Lecture 5 Xmega 128 B1: Architecture MUHAMMAD AMIR YOUSAF VON NEUMAN ARCHITECTURE CPU Memory Execution unit ALU Registers Both data and instructions at the same system
1. Internal Architecture of 8085 Microprocessor
 1. Internal Architecture of 8085 Microprocessor Control Unit Generates signals within up to carry out the instruction, which has been decoded. In reality causes certain connections between blocks of the
1. Internal Architecture of 8085 Microprocessor Control Unit Generates signals within up to carry out the instruction, which has been decoded. In reality causes certain connections between blocks of the
The Atmel ATmega168A Microcontroller
 Ming Hsieh Department of Electrical Engineering EE 459Lx - Embedded Systems Design Laboratory The Atmel ATmega168A Microcontroller by Allan G. Weber 1 Introduction The Atmel ATmega168A is one member of
Ming Hsieh Department of Electrical Engineering EE 459Lx - Embedded Systems Design Laboratory The Atmel ATmega168A Microcontroller by Allan G. Weber 1 Introduction The Atmel ATmega168A is one member of
PD215 Mechatronics. Week 3/4 Interfacing Hardware and Communication Systems
 PD215 Mechatronics Week 3/4 Interfacing Hardware and Communication Systems Interfacing with the physical world A compute device (microprocessor) in mechatronic system needs to accept input information
PD215 Mechatronics Week 3/4 Interfacing Hardware and Communication Systems Interfacing with the physical world A compute device (microprocessor) in mechatronic system needs to accept input information
REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW
 REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW Mrinal Parikshit Chandane Former Assistant Professor, Dept. of E&TC, KJSCE, (India) ABSTRACT Telecommunication applications such as telephony, navigation
REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW Mrinal Parikshit Chandane Former Assistant Professor, Dept. of E&TC, KJSCE, (India) ABSTRACT Telecommunication applications such as telephony, navigation
CSCI-GA Operating Systems I/O. Hubertus Franke
 Operating Systems I/O CSCI-GA.2250-001 Hubertus Franke frankeh@cs.nyu.edu External devices that engage in I/O with computer systems can be grouped into three categories: Human readable suitable for communicating
Operating Systems I/O CSCI-GA.2250-001 Hubertus Franke frankeh@cs.nyu.edu External devices that engage in I/O with computer systems can be grouped into three categories: Human readable suitable for communicating
e-pg Pathshala Subject : Computer Science Paper: Embedded System Module: Serial Port Communication Module No: CS/ES/11 Quadrant 1 e-text
 e-pg Pathshala Subject : Computer Science Paper: Embedded System Module: Serial Port Communication Module No: CS/ES/11 Quadrant 1 e-text In this lecture, serial port communication will be discussed in
e-pg Pathshala Subject : Computer Science Paper: Embedded System Module: Serial Port Communication Module No: CS/ES/11 Quadrant 1 e-text In this lecture, serial port communication will be discussed in
CHAPTER 1 - World of microcontrollers
 CHAPTER 1 - World of microcontrollers One Time Programmable ROM (OTP ROM) One time programmable ROM enables you to download a program into it, but, as its name states, one time only. If an error is detected
CHAPTER 1 - World of microcontrollers One Time Programmable ROM (OTP ROM) One time programmable ROM enables you to download a program into it, but, as its name states, one time only. If an error is detected
DEPARTMENT OF ECE QUESTION BANK SUBJECT: MICROPROCESSOR AND MICROCONTROLLER UNIT-1 PART-A (2 MARKS)
") DEPARTMENT OF ECE QUESTION BANK SUBJECT: MICROPROCESSOR AND MICROCONTROLLER CODE: EC6504 UNIT-1 1. How many memory locations are available in 8086 microprocessor? 2. What are the flags available in 8086
DEPARTMENT OF ECE QUESTION BANK SUBJECT: MICROPROCESSOR AND MICROCONTROLLER CODE: EC6504 UNIT-1 1. How many memory locations are available in 8086 microprocessor? 2. What are the flags available in 8086
IT2A4 EMBEDDED SYSTEMS
 IT2A4 EMBEDDED SYSTEMS UNIT I INTRODUCTION TO EMBEDDED SYSTEMS Definition and Classification Overview of Processors and hardware units in an embedded system Software embedded into the system Exemplary
IT2A4 EMBEDDED SYSTEMS UNIT I INTRODUCTION TO EMBEDDED SYSTEMS Definition and Classification Overview of Processors and hardware units in an embedded system Software embedded into the system Exemplary
Chapter 1. Microprocessor architecture ECE Dr. Mohamed Mahmoud.
 Chapter 1 Microprocessor architecture ECE 3130 Dr. Mohamed Mahmoud The slides are copyright protected. It is not permissible to use them without a permission from Dr Mahmoud http://www.cae.tntech.edu/~mmahmoud/
Chapter 1 Microprocessor architecture ECE 3130 Dr. Mohamed Mahmoud The slides are copyright protected. It is not permissible to use them without a permission from Dr Mahmoud http://www.cae.tntech.edu/~mmahmoud/
Microcomputer Architecture and Programming
 IUST-EE (Chapter 1) Microcomputer Architecture and Programming 1 Outline Basic Blocks of Microcomputer Typical Microcomputer Architecture The Single-Chip Microprocessor Microprocessor vs. Microcontroller
IUST-EE (Chapter 1) Microcomputer Architecture and Programming 1 Outline Basic Blocks of Microcomputer Typical Microcomputer Architecture The Single-Chip Microprocessor Microprocessor vs. Microcontroller
Chapter 13: I/O Systems
 COP 4610: Introduction to Operating Systems (Spring 2015) Chapter 13: I/O Systems Zhi Wang Florida State University Content I/O hardware Application I/O interface Kernel I/O subsystem I/O performance Objectives
COP 4610: Introduction to Operating Systems (Spring 2015) Chapter 13: I/O Systems Zhi Wang Florida State University Content I/O hardware Application I/O interface Kernel I/O subsystem I/O performance Objectives
MCS-51 Serial Port A T 8 9 C 5 2 1
 MCS-51 Serial Port AT89C52 1 Introduction to Serial Communications Serial vs. Parallel transfer of data Simplex, Duplex and half-duplex modes Synchronous, Asynchronous UART Universal Asynchronous Receiver/Transmitter.
MCS-51 Serial Port AT89C52 1 Introduction to Serial Communications Serial vs. Parallel transfer of data Simplex, Duplex and half-duplex modes Synchronous, Asynchronous UART Universal Asynchronous Receiver/Transmitter.
SPI Universal Serial Communication Interface SPI Mode
 SPI Universal Serial Communication Interface SPI Mode Serial Peripheral Interface (SPI) is not really a protocol, but more of a general idea. It s the bare-minimum way to transfer a lot of data between
SPI Universal Serial Communication Interface SPI Mode Serial Peripheral Interface (SPI) is not really a protocol, but more of a general idea. It s the bare-minimum way to transfer a lot of data between
Hello, and welcome to this presentation of the STM32L4 power controller. The STM32L4 s power management functions and all power modes will also be
 Hello, and welcome to this presentation of the STM32L4 power controller. The STM32L4 s power management functions and all power modes will also be covered in this presentation. 1 Please note that this
Hello, and welcome to this presentation of the STM32L4 power controller. The STM32L4 s power management functions and all power modes will also be covered in this presentation. 1 Please note that this
 UNIT II SYSTEM BUS STRUCTURE 1. Differentiate between minimum and maximum mode 2. Give any four pin definitions for the minimum mode. 3. What are the pins that are used to indicate the type of transfer
UNIT II SYSTEM BUS STRUCTURE 1. Differentiate between minimum and maximum mode 2. Give any four pin definitions for the minimum mode. 3. What are the pins that are used to indicate the type of transfer
UNIT - II PERIPHERAL INTERFACING WITH 8085
 UNIT - II PERIPHERAL INTERFACING WITH 8085 Peripheral Interfacing is considered to be a main part of Microprocessor, as it is the only way to interact with the external world. The interfacing happens with
UNIT - II PERIPHERAL INTERFACING WITH 8085 Peripheral Interfacing is considered to be a main part of Microprocessor, as it is the only way to interact with the external world. The interfacing happens with
8051 Microcontroller
 8051 Microcontroller 1 Salient Features (1). 8 bit microcontroller originally developed by Intel in 1980. (2). High-performance CMOS Technology. (3). Contains Total 40 pins. (4). Address bus is of 16 bit
8051 Microcontroller 1 Salient Features (1). 8 bit microcontroller originally developed by Intel in 1980. (2). High-performance CMOS Technology. (3). Contains Total 40 pins. (4). Address bus is of 16 bit
Home Security System with Remote Home Automation Control
 Home Security System with Remote Home Automation Control Justin Klumpp Senior Project Hardware Description Western Washington University April 24 2005 Professor Todd Morton Introduction: This document
Home Security System with Remote Home Automation Control Justin Klumpp Senior Project Hardware Description Western Washington University April 24 2005 Professor Todd Morton Introduction: This document
Module Introduction. PURPOSE: The intent of this module is to explain MCU processing of reset and interrupt exception events.
 Module Introduction PURPOSE: The intent of this module is to explain MCU processing of reset and interrupt exception events. OBJECTIVES: - Describe the difference between resets and interrupts. - Identify
Module Introduction PURPOSE: The intent of this module is to explain MCU processing of reset and interrupt exception events. OBJECTIVES: - Describe the difference between resets and interrupts. - Identify
CMSC 313 COMPUTER ORGANIZATION & ASSEMBLY LANGUAGE PROGRAMMING LECTURE 09, SPRING 2013
 CMSC 313 COMPUTER ORGANIZATION & ASSEMBLY LANGUAGE PROGRAMMING LECTURE 09, SPRING 2013 TOPICS TODAY I/O Architectures Interrupts Exceptions FETCH EXECUTE CYCLE 1.7 The von Neumann Model This is a general
CMSC 313 COMPUTER ORGANIZATION & ASSEMBLY LANGUAGE PROGRAMMING LECTURE 09, SPRING 2013 TOPICS TODAY I/O Architectures Interrupts Exceptions FETCH EXECUTE CYCLE 1.7 The von Neumann Model This is a general
Topics. Interfacing chips
 8086 Interfacing ICs 2 Topics Interfacing chips Programmable Communication Interface PCI (8251) Programmable Interval Timer (8253) Programmable Peripheral Interfacing - PPI (8255) Programmable DMA controller
8086 Interfacing ICs 2 Topics Interfacing chips Programmable Communication Interface PCI (8251) Programmable Interval Timer (8253) Programmable Peripheral Interfacing - PPI (8255) Programmable DMA controller
_ V Intel 8085 Family In-Circuit Emulation. Contents. Technical Notes
 _ V9.12. 225 Technical Notes Intel 8085 Family In-Circuit Emulation This document is intended to be used together with the CPU reference manual provided by the silicon vendor. This document assumes knowledge
_ V9.12. 225 Technical Notes Intel 8085 Family In-Circuit Emulation This document is intended to be used together with the CPU reference manual provided by the silicon vendor. This document assumes knowledge
Course Introduction. Content: 21 pages 4 questions. Learning Time: 35 minutes
 Course Introduction Purpose: The intent of this course is to provide embedded control engineers with valuable implementation instructions on HCS08 port pins and the Keyboard Interrupt (KBI) module. Objectives:
Course Introduction Purpose: The intent of this course is to provide embedded control engineers with valuable implementation instructions on HCS08 port pins and the Keyboard Interrupt (KBI) module. Objectives:
3. (a) Explain the steps involved in the Interfacing of an I/O device (b) Explain various methods of interfacing of I/O devices.
 Explain the steps involved in the Interfacing of an I/O device (b) Explain various methods of interfacing of I/O devices.") Code No: R05320202 Set No. 1 1. (a) Discuss the minimum mode memory control signals of 8086? (b) Explain the write cycle operation of the microprocessor with a neat timing diagram in maximum mode. [8+8]
Code No: R05320202 Set No. 1 1. (a) Discuss the minimum mode memory control signals of 8086? (b) Explain the write cycle operation of the microprocessor with a neat timing diagram in maximum mode. [8+8]
SRI VIDYA COLLEGE OF ENGINEERING AND TECHNOLOGY,VIRUDHUNAGAR
 Year/sem: 02/04 Academic Year: 2014-2015 (even) UNIT II THE 8086 SYSTEM BUS STRUCTURE PART A 1. What are the three groups of signals in 8086? The 8086 signals are categorized in three groups. They are:
Year/sem: 02/04 Academic Year: 2014-2015 (even) UNIT II THE 8086 SYSTEM BUS STRUCTURE PART A 1. What are the three groups of signals in 8086? The 8086 signals are categorized in three groups. They are:
Chapter 13: I/O Systems
 Chapter 13: I/O Systems Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance 13.2 Silberschatz, Galvin
Chapter 13: I/O Systems Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance 13.2 Silberschatz, Galvin
Chapter 13: I/O Systems. Chapter 13: I/O Systems. Objectives. I/O Hardware. A Typical PC Bus Structure. Device I/O Port Locations on PCs (partial)
") Chapter 13: I/O Systems Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance 13.2 Silberschatz, Galvin
Chapter 13: I/O Systems Chapter 13: I/O Systems I/O Hardware Application I/O Interface Kernel I/O Subsystem Transforming I/O Requests to Hardware Operations Streams Performance 13.2 Silberschatz, Galvin
These three counters can be programmed for either binary or BCD count.
 S5 KTU 1 PROGRAMMABLE TIMER 8254/8253 The Intel 8253 and 8254 are Programmable Interval Timers (PTIs) designed for microprocessors to perform timing and counting functions using three 16-bit registers.
S5 KTU 1 PROGRAMMABLE TIMER 8254/8253 The Intel 8253 and 8254 are Programmable Interval Timers (PTIs) designed for microprocessors to perform timing and counting functions using three 16-bit registers.