Tactile-Visual Integration for Task-Aware Grasping. Mabel M. Zhang, Andreas ten Pas, Renaud Detry, Kostas Daniilidis
|
|
|
- Tabitha Parrish
- 5 years ago
- Views:
Transcription

1 Tactile-Visual Integration for Task-Aware Grasping Mabel M. Zhang, Andreas ten Pas, Renaud Detry, Kostas Daniilidis


2 Molyneux s Question William Molyneux s famous question to John Locke in 1688: Suppose a Man born blind, and now adult, and taught by his touch to distinguish between a Cube, and a Sphere of the same metal, and nighly of the same bigness, so as to tell, when he felt one and t other; which is the Cube, which the Sphere. Suppose then the Cube and Sphere placed on a Table, and the Blind Man to be made to see. Quaere, Whether by his sight, before he touch d them, he could now distinguish, and tell, which is the Globe, which the Cube. 2




3 Development of Touch Streri 1986, 1987, 1988, 2000, 2003, 2004 Newborns, 2- and 5-month-olds touch-only shape discrimination vision-touch transfer Meltzoff month olds; oral touch Cowey 1975 Rhesus monkeys food/sand in the dark Icons by Freepik, Smashicons from flaticon.com 3




4 Sensory Substitution & Active Exploration Bach-y-Rita 1969, White 1970 Also: active exploration 4












5 Why touch? Perception Manipul Darkness Transparency Complex task Underwater Inside a bag Slippag Smoke Reflection Adaptation Occlusion Nonprehe Image sources journalstar.com whaleshark.org.au brede-art.com alibaba.com kjpargeter from Freepik goir/shutterstock.com IROS 2017 Manip. Challenge Hang





6 Broadly-Related Work Transplant vision techniques to touch Schneider 2009 BoW Pezzementi 2011 BoW, moments, SIFT Strub 2014 moments Luo 2015 tactile SIFT Luo 2016 ICP, BoW Yuan 2017 CNN Calandra 2017 CNN Hollis 2018 compress 8
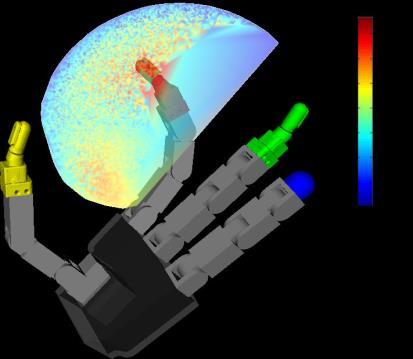
7 Intuition of End-effector pose Approach: Object poseindependent; Geometric; Holistic; Sparse contacts (low cost $) Contact point (x, y, z) 1 Contact point (x, y, z) 3 Contact point (x, y, z) 2 Triangle (l 0, l 1, a 0 ) Zhang et al. IROS


8 Histogram of Triangles Build 3D histogram of triangle parameters Move hand; Repeat Zhang et al. IROS 2016 Classifier 10
9 Avg accuracy over 100 train-test splits Avg accuracy over 100 train-test splits Histogram Parameters Mesh Cloud Accuracy for Various Histogram Parameters Physics Simulation Accuracy for Various Histogram Parameters Number of bins per 3D histogram dimension Highest: 90.3% from (l1, l2, a2) and 10 bins Number of bins per 3D histogram dimension Highest: 73.9% from (a1, a2, l0) and 20 bins Zhang et al. IROS

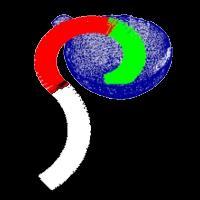
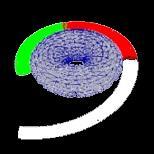
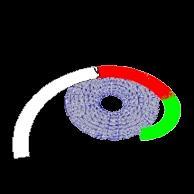
10 Qualitative Contact Clouds Zhang et al. IROS



11 Pairwise Distances Least similar objects Most similar objects (bottle) In-between objects Zhang et al. IROS

12 Intuition of Approach: Objects share similar local features; there s distribution observation z 1 observation z 2 Actions are associated with local geometric observations wrist pose p 1 action a Zhang et al. IROS 2017 wrist pose p 2 14










13 Active Pose Selection Poses selected at test time (recognized in 2-9 moves): Zhang et al. IROS

14 Active Pose Selection Zhang et al. IROS












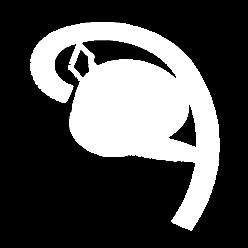



15 On a Continuum Manipulator Simulation (recognition under 3 wraps) Real (no sensors) Mao*, Zhang*, et al. IROS

16 Enclosure contacts only Drawbacks Lederman & Klatzky 1987 exploratory procedures 19


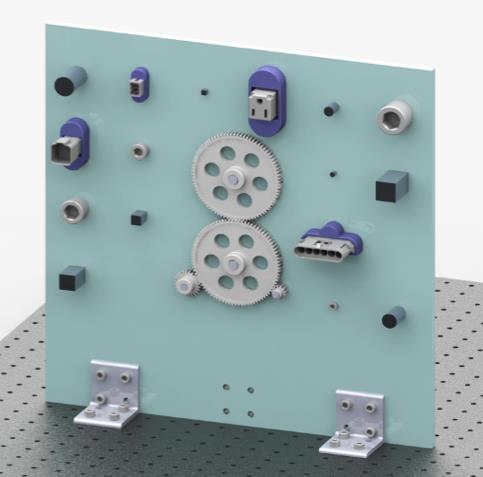
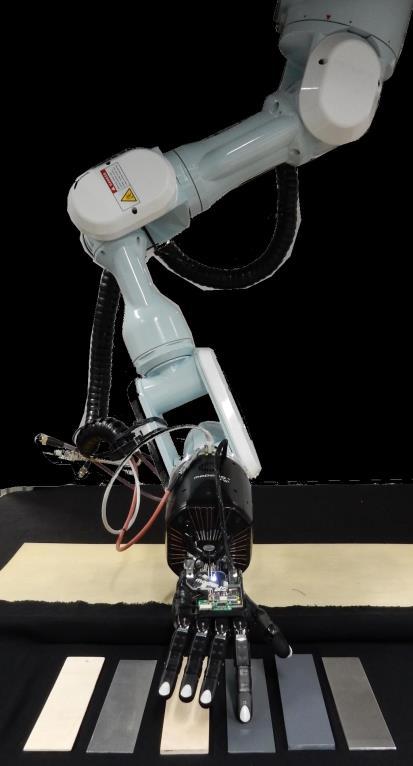
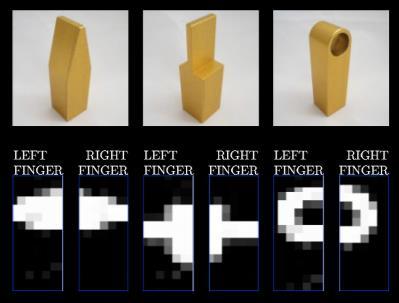
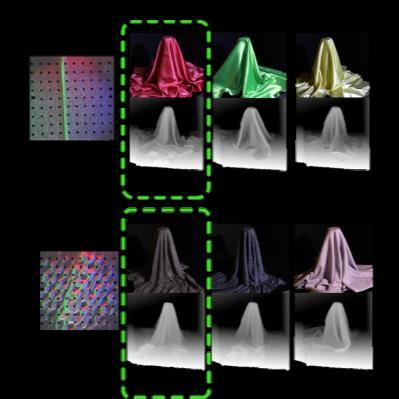
17 Visuotactile Integration (2x3) x 3 TakkTile barometric sensors 20
18 Problem: Grasp success from vision + touch, with Task semantics (beyond pick and place) 21
19 Visuotactile Representation 1. Spatial Correspondence? 2. Leverage state of the art in vision? Input CNN 0 1 FC Grasp Success Conv 22




20 Related Work Yuan CVPR 2017 Fabric material classification Kinect + camera-based touch Calandra CoRL 2017 Grasp success probability RGB + camera-based touch Varley arxiv D CNN on voxels Depth + tactile point cloud 23


21 Visuotactile Representation 3. Semantic task? Implementation from Detry et al. IROS


22 Visuotactile Representation Correspondence: Camera frame Output: Grasp success 25




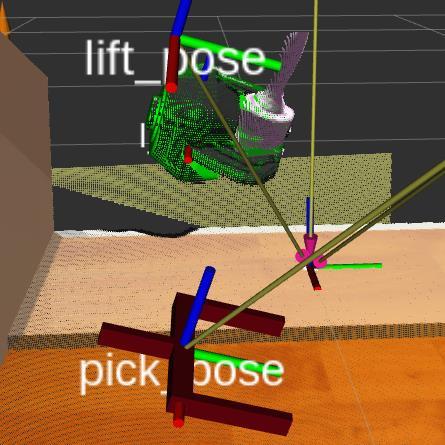
23 6DOF Tactile Grasp Collection Random Scene Point Cloud RGB View Off-the-shelf Grasps Tactile Simulation Grasp and Lift 26





24 Tactile Input & Grasp Label Good Grasp Bad Grasp Contact readings Grasp Success Label Good Lift Slipped Lift 27

: pour")


25 Task Label Binary task labels in CAD (Detry et al. IROS 2017): pour handover Transform contact points to object frame Task label from CAD Grasp 28
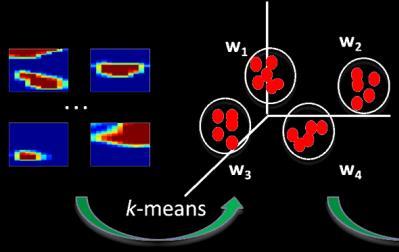
26 Tactile Heatmap Visualization Successful grasps Unsuccessful grasps 29





27 Dex-Net 2.0 Planar Grasps Crop to local grasp; center row of pixels aligned to grasp axis Successful grasps Unsuccessful grasps Mahler et al. RSS





28 Simulated Tactile Heat Map 2D normal + thickness Successful grasps Unsuccessful grasps 0 thickness normal
29 Results on Dex-Net Adv-Synth Subset 32
30 Ongoing Work Currently collected 10,000 grasps 10x? Adv-Synth has 189,300 grasps, 1/6 of Dex-Net






31 Challenges Visuotactile representation Sim-to-real transfer Sensory input Physics Rusu 2016 James 2017 Inoue




32 Future Work Courtesy of K. Queen 35
33
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Feature Point Extraction using 3D Separability Filter for Finger Shape Recognition
 Feature Point Extraction using 3D Separability Filter for Finger Shape Recognition Ryoma Yataka, Lincon Sales de Souza, and Kazuhiro Fukui Graduate School of Systems and Information Engineering, University
Feature Point Extraction using 3D Separability Filter for Finger Shape Recognition Ryoma Yataka, Lincon Sales de Souza, and Kazuhiro Fukui Graduate School of Systems and Information Engineering, University
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall Midterm Examination
 ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field
 07 5th European Signal Processing Conference (EUSIPCO) 3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field Xiao Lin Josep R.Casas Montse Pardás Abstract Traditional image segmentation
07 5th European Signal Processing Conference (EUSIPCO) 3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field Xiao Lin Josep R.Casas Montse Pardás Abstract Traditional image segmentation
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field
 3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field Xiao Lin Image Processing Group Technical University of Catalonia (UPC) Barcelona, Spain Josep R.Casas Image Processing Group
3D Point Cloud Segmentation Using a Fully Connected Conditional Random Field Xiao Lin Image Processing Group Technical University of Catalonia (UPC) Barcelona, Spain Josep R.Casas Image Processing Group
Improving Vision-based Topological Localization by Combining Local and Global Image Features
 Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
From 3D descriptors to monocular 6D pose: what have we learned?
 ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
ECCV Workshop on Recovering 6D Object Pose From 3D descriptors to monocular 6D pose: what have we learned? Federico Tombari CAMP - TUM Dynamic occlusion Low latency High accuracy, low jitter No expensive
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Martian lava field, NASA, Wikipedia
 Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document
 Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor Supplemental Document Franziska Mueller 1,2 Dushyant Mehta 1,2 Oleksandr Sotnychenko 1 Srinath Sridhar 1 Dan Casas 3 Christian Theobalt
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Cascade Region Regression for Robust Object Detection
 Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Planning, Execution and Learning Application: Examples of Planning in Perception
 15-887 Planning, Execution and Learning Application: Examples of Planning in Perception Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Graph search for perception Planning for
15-887 Planning, Execution and Learning Application: Examples of Planning in Perception Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Graph search for perception Planning for
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering
 AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Content Based Image Retrieval
 Content Based Image Retrieval R. Venkatesh Babu Outline What is CBIR Approaches Features for content based image retrieval Global Local Hybrid Similarity measure Trtaditional Image Retrieval Traditional
Content Based Image Retrieval R. Venkatesh Babu Outline What is CBIR Approaches Features for content based image retrieval Global Local Hybrid Similarity measure Trtaditional Image Retrieval Traditional
Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation
 Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation David Inkyu Kim Gaurav S. Sukhatme Abstract When a robot is deployed it needs to understand the nature of its surroundings.
Semantic Labeling of 3D Point Clouds with Object Affordance for Robot Manipulation David Inkyu Kim Gaurav S. Sukhatme Abstract When a robot is deployed it needs to understand the nature of its surroundings.
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation. Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University
 Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014
 Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Shape Matching for 3D Retrieval and Recognition. Agenda. 3D collections. Ivan Sipiran and Benjamin Bustos
 Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
Background subtraction in people detection framework for RGB-D cameras
 Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Automatic Colorization of Grayscale Images
 Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot
 An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot Oscar Alonso-Ramirez, Yaser Aguas-Garcia, Antonio Marin-Hernandez, Homero V. Rios-Figueroa,
An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot Oscar Alonso-Ramirez, Yaser Aguas-Garcia, Antonio Marin-Hernandez, Homero V. Rios-Figueroa,
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
arxiv: v1 [cs.ro] 11 Jul 2016
![arxiv: v1 [cs.ro] 11 Jul 2016](/thumbs/76/73190720.jpg "arxiv: v1 [cs.ro] 11 Jul 2016") Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda arxiv:1607.02867v1
Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda arxiv:1607.02867v1
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Convolutional-Recursive Deep Learning for 3D Object Classification
 Convolutional-Recursive Deep Learning for 3D Object Classification Richard Socher, Brody Huval, Bharath Bhat, Christopher D. Manning, Andrew Y. Ng NIPS 2012 Iro Armeni, Manik Dhar Motivation Hand-designed
Convolutional-Recursive Deep Learning for 3D Object Classification Richard Socher, Brody Huval, Bharath Bhat, Christopher D. Manning, Andrew Y. Ng NIPS 2012 Iro Armeni, Manik Dhar Motivation Hand-designed
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
A framework for visual servoing
 A framework for visual servoing Danica Kragic and Henrik I Christensen Centre for Autonomous Systems, Royal Institute of Technology, S-10044 Stockholm, Sweden, danik,hic @nada.kth.se http://www.nada.kth.se/
A framework for visual servoing Danica Kragic and Henrik I Christensen Centre for Autonomous Systems, Royal Institute of Technology, S-10044 Stockholm, Sweden, danik,hic @nada.kth.se http://www.nada.kth.se/
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
A New Algorithm for Shape Detection
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 19, Issue 3, Ver. I (May.-June. 2017), PP 71-76 www.iosrjournals.org A New Algorithm for Shape Detection Hewa
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 19, Issue 3, Ver. I (May.-June. 2017), PP 71-76 www.iosrjournals.org A New Algorithm for Shape Detection Hewa
High-Level Computer Vision
 High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Describing 3D Geometric Primitives Using the Gaussian Sphere and the Gaussian Accumulator
 Noname manuscript No. (will be inserted by the editor) Describing 3D Geometric Primitives Using the Gaussian and the Gaussian Accumulator Zahra Toony Denis Laurendeau Christian Gagné Received: date / Accepted:
Noname manuscript No. (will be inserted by the editor) Describing 3D Geometric Primitives Using the Gaussian and the Gaussian Accumulator Zahra Toony Denis Laurendeau Christian Gagné Received: date / Accepted:
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Image Classification pipeline. Lecture 2-1
 Lecture 2: Image Classification pipeline Lecture 2-1 Administrative: Piazza For questions about midterm, poster session, projects, etc, use Piazza! SCPD students: Use your @stanford.edu address to register
Lecture 2: Image Classification pipeline Lecture 2-1 Administrative: Piazza For questions about midterm, poster session, projects, etc, use Piazza! SCPD students: Use your @stanford.edu address to register
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Semantic RGB-D Perception for Cognitive Robots
 Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Filtering and mapping systems for underwater 3D imaging sonar
 Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
Filtering and mapping systems for underwater 3D imaging sonar Tomohiro Koshikawa 1, a, Shin Kato 1,b, and Hitoshi Arisumi 1,c 1 Field Robotics Research Group, National Institute of Advanced Industrial
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES
 FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
CIS 467/602-01: Data Visualization
 CIS 467/60-01: Data Visualization Isosurfacing and Volume Rendering Dr. David Koop Fields and Grids Fields: values come from a continuous domain, infinitely many values - Sampled at certain positions to
CIS 467/60-01: Data Visualization Isosurfacing and Volume Rendering Dr. David Koop Fields and Grids Fields: values come from a continuous domain, infinitely many values - Sampled at certain positions to
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Human Pose Estimation with Deep Learning. Wei Yang
 Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
(Deep) Learning for Robot Perception and Navigation. Wolfram Burgard
 Learning for Robot Perception and Navigation. Wolfram Burgard") (Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
(Deep) Learning for Robot Perception and Navigation Wolfram Burgard Deep Learning for Robot Perception (and Navigation) Lifeng Bo, Claas Bollen, Thomas Brox, Andreas Eitel, Dieter Fox, Gabriel L. Oliveira,
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Operation of machine vision system
 ROBOT VISION Introduction The process of extracting, characterizing and interpreting information from images. Potential application in many industrial operation. Selection from a bin or conveyer, parts
ROBOT VISION Introduction The process of extracting, characterizing and interpreting information from images. Potential application in many industrial operation. Selection from a bin or conveyer, parts
Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials
 Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials Yuanjun Xiong 1 Kai Zhu 1 Dahua Lin 1 Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University
Recognize Complex Events from Static Images by Fusing Deep Channels Supplementary Materials Yuanjun Xiong 1 Kai Zhu 1 Dahua Lin 1 Xiaoou Tang 1,2 1 Department of Information Engineering, The Chinese University
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Towards Robotic Garment Folding: A Vision Approach for Fold Detection
 Towards Robotic Garment Folding: A Vision Approach for Fold Detection David Estevez, Juan G. Victores, Santiago Morante and Carlos Balaguer Abstract Folding clothes is a current trend in robotics. Previously
Towards Robotic Garment Folding: A Vision Approach for Fold Detection David Estevez, Juan G. Victores, Santiago Morante and Carlos Balaguer Abstract Folding clothes is a current trend in robotics. Previously
Adaptive Action Detection
 Adaptive Action Detection Illinois Vision Workshop Dec. 1, 2009 Liangliang Cao Dept. ECE, UIUC Zicheng Liu Microsoft Research Thomas Huang Dept. ECE, UIUC Motivation Action recognition is important in
Adaptive Action Detection Illinois Vision Workshop Dec. 1, 2009 Liangliang Cao Dept. ECE, UIUC Zicheng Liu Microsoft Research Thomas Huang Dept. ECE, UIUC Motivation Action recognition is important in
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
BIN PICKING APPLICATIONS AND TECHNOLOGIES
 BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
BIN PICKING APPLICATIONS AND TECHNOLOGIES TABLE OF CONTENTS INTRODUCTION... 3 TYPES OF MATERIAL HANDLING... 3 WHOLE BIN PICKING PROCESS... 4 VISION SYSTEM: HARDWARE... 4 VISION SYSTEM: SOFTWARE... 5 END
RGBD Face Detection with Kinect Sensor. ZhongJie Bi
 RGBD Face Detection with Kinect Sensor ZhongJie Bi Outline The Existing State-of-the-art Face Detector Problems with this Face Detector Proposed solution to the problems Result and ongoing tasks The Existing
RGBD Face Detection with Kinect Sensor ZhongJie Bi Outline The Existing State-of-the-art Face Detector Problems with this Face Detector Proposed solution to the problems Result and ongoing tasks The Existing
Kinsight: Localizing and Tracking Household Objects using Depth-Camera Sensors
 Kinsight: Localizing and Tracking Household Objects using Depth-Camera Sensors Shahriar Nirjon and John Stankovic Department of Computer Science University of Virginia Household Object Localization Problem
Kinsight: Localizing and Tracking Household Objects using Depth-Camera Sensors Shahriar Nirjon and John Stankovic Department of Computer Science University of Virginia Household Object Localization Problem
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction
 Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information